
【 전기회로 구성요소 】
가. 접촉 스위치
① 전기회로의 개폐 또는 접촉을 변경시키는 기구로 명령용 스위치와 검출용 스위치가 있다.
㉠ a접점 (녹색) : 접점이 항상 열려 있고 버튼을 누르면 닫히는 것, 통전이 되는 것을 의미하는 미터 접점
㉡ b접점 (적색) : 접점이 항상 닫혀 있고 통전되고 있다가 버튼을 누르면 열리는 것
통전을 차단되는 것으로 브레이크 접점이라 한다.
㉢ c접점(황색) : 한 스위치에 a접점과 b접점을 동시에 가지고 있는 접점
② 텀블러 스위치 (TS : tumbler switch) : 지시형 푸시 버튼 스위치 또는 로커 스위(locker switch)라고도 한다.
③ 누름 버튼 스위치 (PBS : push button switch) : 가장 일반적으로 사용되고 있는 스위치로 상시 열림 스위치와
상시 닫힘 스위치가 있다.
④ 리밋 스위치 (LS : limit switch) : 수동으로 조작하는 누름 버튼 스위치를 대신하여 기계적인 조작에 의해 접점을 개폐
하는 스위치이다.
나. 비접촉 스위치
① 광 스위치 (PHOS : photo electric switch) : 투광기 내의 광원에서 반사된 물체에 의하여 차단 또는 반사되어 변화하는
광량을 수광기 내의 광전 변환 소자에 의하여 전기량으로 변화시킴으로써 스위치를 종작시키고 물체의 유무나
상태 변화 등을 무접촉으로 검출하는 스위치이다.
② 근접 스위치 (PROS : proximity switch, electric proximity switch)
㉠ 리드 스위치 : 자석으로 작동이 빠른 전환 사이클이 요구될 때 적당하며 스위치 자체는 전기 부품이지만, 실린더의
작동 검출에 사용되고 있으며 공유압 기기의 부속기기로 여긴다.

㉡ 유도형 (고주파 발진형) 센서 : 자계를 이용하여 검출하는 센서로 금속만 감지하고, 주요 구성요소에는 발진회로, 검파
회로, 트리거 회로, 출력회로가 있다.
㉢ 정전용량형 근접 센서 : 검출회로는 고주파 발진회로이여, 그 일부로 검출 면에 전극이 배치되어 있다. 물체의 이동에
따른 발진 신호는 변조 회로로 검파되고, 트리거 회로를 거쳐 출력 회로에 의해 출련된다. 금속 및 비금속도
검출이 가능하다.
▣ 인터록 회로 : 복수 작동일 때 어떤 조건이 구비될 때까지 작동을 저지시키는 회로로, 기기를 안전하고 확실하게 운전시
키 위한 판단회로이다.
다. 전자릴레이 (MC : Magnetic contact : 전자 계전기)
⊙ 전자릴레이는 제어 전류를 개폐하는 스위치의 조작을 전자석의 힘으로 하는 것으로 내구성이 좋다.
라. 타이머 (TR : Time lag relay) :
릴레이의 일종으로 입력 신호를 받은 후 설정 시간이 경과한 후 회로를 개폐하는 기기이다. 종류에는 여자 지연 (delay
ON type) 타이머와 소자 지연 (delay OFF type) 타이머가 있다.
▣ 전기 - 기계 구동장치 : 1차 구동 요소로서 전기 모터를 사용하고 웜과 웜 휠을 통해 나선식 스핀들을 구동시키는
전기 - 기계 구동 장치이다. 전기 모터에 의해 나선식 스핀들이 회전하면서 피스톤 로드를 왕복시킨다.
【 출제 예상 문제】
56. 핸들링 (handling)의 용어를 설명한 것 중 옳지 않은 것은 ? [12-4] ②
① 반전 (turnover) - 180 ° 의 회전이나 선회에 의해 위치를 변경하는 것으로 부품을 거꾸로 위치시키거나 전후를 역전시키
는 것
② 전환 (diversion) - 기계로 공급되고 있는 부품을 교체하는 것
③ 회전 (rotation) - 부품 자체의 중앙부를 기준으로 위치를 변경시키는 것
④ 선회 (swiveling) - 부품으로 부터 떨어진 지점을 중심으로 위치를 변경시키는 것
[해설] 전환 (diversion) - 기계로 공급되고 있는 부품의 방향을 변경시키는 것
57. 핸들링 (handling)에서 생산 작업과 관련된 자재나 작업물의 모든 이동 기능을 이송 (feeding)이라 한다. 이 이송에 해당
되지 않는 것은 ? [13-4, 19-1] ④
① 취합 (merging) ② 계량 (metering) ③ 분류 (distruting) ④ 위치 결정 (position control)
[해설] 이 외에 진출 (advancing), 위치 및 추출 (locating and ejecting) 이 있다.
58. 기계를 사용하여 특정 가공물을 핸들링하고자 할 때 기계적 제한사항이 아닌 것은 ? [20 -4] ②
① 모양 ② 색상 ③ 재질 ④ 구조적 특성
[해설] 색상은 포토 센서를 이용하여 해결되므로 전기 전자적 제한사항이다.
59. 직각 좌표상에서 두 축을 동시에 제어할 때 두축이 한 점에서 다른 점까지 움직이는 궤적을 원이 되도록 제어하는 방법
은 무엇인가 ? [08-4, 14-4, 17-4] ②
① 머니퓰레이터 (manipulator) ② 원호 보간 (circle interpolation)
③ 직선 보간 (linear interpolation) ④ 티칭 플레이 백 (teaching play back)
60. 위치 데이터를 서보 오프 상태에서 수동 조작하여 위치를 확인한 후 데이터를 입력 제어하는 방법은 ? [17-2, 18-1] ④
① 서보 레디 (servo ready) ② 직선 보간 (linear interpolation)
③ 포인트 투 포인트 (point to point) ④ 티칭 플레이 백 (teaching play back)
[해설] 티칭 플레이 백 (teaching play back) : 사람이 기계에 어떤 내용을 지시하면 이 정보를 전달받은 기계가 지시된 내용
에 따라 작업을 재연하는 일.
※ 로봇이 사람 손에 의한 지시나 동작을 기억하는 방식으로 그 중 다이렉트 티칭은 말 그대로 로봇한테 사람이 직접적으
로 가르치는 방식이다. 숙련된 기술자가 산업용 로봇의 팔과 손을 직접 움직이면서 동작을 하나씩 가르치는 것으로
로봇이 작업을 이해하기 쉽고 사람손에 의한 것이라 직감적인 요소가 있다.
61. 다음 중 작업 경험 등을 반영하여 적절한 작업을 행하는 제어 기능을 가진 로봇은 어느 것인가 ? [07-4, 09-4] ②
① 플레이 백 로봇 ② 합습제어 로봇 ③ 감각 제어 로봇 ④ 수치 제어 로봇
62. 로봇 운영 방식에 대한 용어 설명 중 잘못된 것은 ? [19-2] ①
① 서보 레디 (SVRDY : servo ready) : 아날로그 타입에서 드라이버로 출력하는 속도 명령으로서 최대 ± 10 V 이다.
② 매뉴얼 데이터 입력 (MDI : manual data input) 방식 : 이미 정의된 위치 데이터를 수동 키 (key) 조작에 의해 직접 입력
하는 방식이다.
③ 티칭 플레이 백 (TPB : teaching play back) 방식 : 위치 데이터를 서보 오프 (servo off) 상태에서 수동 조작하여 위치를
확인한 후 입력하는 방식이다.
④ 포인트 투 포인트 (PTP : point to point) : 직각 좌표상에서 두 축을 동시에 제어할 때 두 축이 한점에서 다른 점까지 움직
이는데 있어서 궤적에 상관없이 중간점들이 지정되지 않는 채 제어하는 방식이다.
[해설] ㉠ 서보 레디 (SVRDY : servo ready) : 전원 공급 후 컨트롤러가 이상 유무를 확인하기 전에 드라이버 측에서 컨트롤
러로 보내는 준비 신호
㉡ 서보 알람 (SVALM : servo alarm) : 컨트롤러에서 이상 유무를 확인한 후 이상 발생시 나타나는 신호
㉢ 전압 커멘드 (VC : voltage command) : 아날로그 타입에서 드라이버로 출력하는 속도 명령으로서 최대 ± 10 V 이다.
63. 룰러 체인 free flow 컨베이어형 자동 조립 라인에서 파렛이 작업 위치에 인입되어도 스토퍼 실린더가 상승하지 않아서
파렛의 흐름을 정지시키지 못하고 있다면 트러블 원인은 무엇인가 ? [14-2] ②
① 롤러 체인의 틈새로 스크류 볼트가 박혀서 체인 구동 모터가 과부하 트립되고 있다.
② 스토퍼 실린더를 구동하는 솔레노이드 밸브의 코일이 소손되어 밸브가 절환되지 않는다.
③ 제어반 내 PLC CPU 의 전전 key S/W를 RUN 모드가 아닌 STOP 모드에 두어 PLC가 정지되었다.
④ 컨베이어의 이송 속도를 제어하는 인버터의 고장으로 이송 속도가 제어되지 않는다.
[해설] 파렛이 작업 위치에 인입되어도 스토퍼 실린더가 상승하지 않는 이유는 스토퍼 실린더가 불가 상태로 솔레노이드
밸브의 이상에 원인이 있다. 컨베이어가 구동이 안되거나 PLC가 STOP 모드이면 파렛은 이송이 불가능하며, 컨베
이어의 이송 속도가 빠르고 높음과 스토퍼 실린더는 관계가 없다.
64. 컨베이어를 설계하는 원칙으로 적절하지 않은 것은 ? [18-4] ②
① 속도의 원칙 ② 혼재의 원칙 ③ 균일성의 원칙 ④ 이송 능력의 한계
65. 로봇의 감지 장치에 대한 설명으로 잘못된 것은 ? [19-4] ③
① 물체의 위치는 외계 조건이다. ② 가속도와 회전력은 내계 조건이다.
③ 퍼텐쇼미터의 출력은 디지털 신호이다. ④ 촉각 센서는 물체의 형상과 접촉 여부를 감지한다.
[해설] 퍼텐쇼 미터의 출력은 아날로그 신호이다.
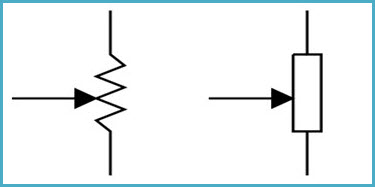
▣ 포텐션미터(Potentiometer)를 우리말로 전위차계, 분압기 등이 있지만 일반적으로 가변저항이라고 부른다. 즉, 고정되
어있는 저항이 아닌 임의의 저항값으로 조절이 가능한 저항기다. 대부분의 가변저항은 최소저항이 0 [Ω] 옴으로 정해
져 있고, 최대 저항은 제품별로 1K, 10K, 100K로 결정이 되어 있다. 주변에서 가변저항을 많이 접하는 곳은 음향장치
에 사용하는 볼륨이나 조명 밝기를 조절하는 장치들이다. 가변저항의 원리는 내부에 카본(탄소) 띠로 구성되어있는
저항 성분을 와이퍼로 길이를 조절해서 저항값이 조절되도록 하는 구조다. 회로에서 사용하는 Symbol은 아래처럼 표
현한다.
▣ 서보모터 (servo- motor) : DC모터와 피드백 회로가 내장되어 있어 속도/위치 제어가 가능한 모터로서 위치 제어가 비교
적 쉽고 정확하며, 사이즈도 컴팩트한 이유로 장난감 모터로 많이 사용되고 있다.
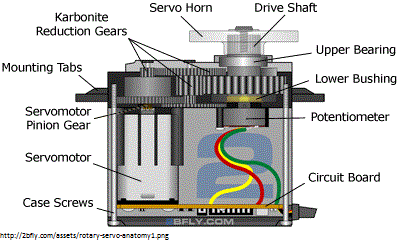
※ 전원이 입력되면 왼쪽 하단의 서보모터가 구동되어 위치를 이용하면 오른쪽 하단의 포텐쇼 미터가 위치 등을 검색하여
피드백하여 서모모터의 구동을 조절한다.
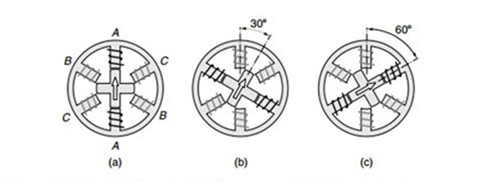
▣ 스테핑 모터(stepping motor) : Step단위로 이동이 가능한 모터이다. 1개의 펄스가 입력이 될 때 정해진 각도로 1 스탭
회전이 가능한 모터이다. 서보 모터는 180까지 회전이 가능하지만, 스테핑 모터는 무한 회전이 가능하다. 하지만
엔코더가 없어서 자기 위치를 알 수 없고, 모터를 구동 하기 위해 별도의 스탭 모터 컨트롤로가 필요하다.
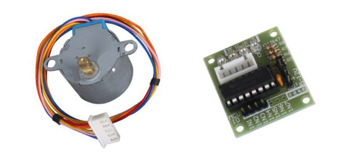
아래 그림은 360° 회전이 가능한 스탭모터 구조를 나타내 주고 있다.
66. 일반적으로 가정이나 산업 현장에서 사용하고, 시간에 따라 크기와 방향이 변화하는 특징을 갖고 있는 전기는 무엇
인가 ? [10-4] ①
① 교류 ② 직류 ③ 와류 ④ 맥류
[해설] 일반적으로 가정이나 산업 현장에서 사용하는 교류 (AC)는 시간에 따라 크기와 방향이 변하지만, 건전지와 같은
직류 (DC)는 시간에 따라 크기가 일정하게 유지된다.
67. 전기 타임 릴레이의 구성요소 중 공압의 체크 밸브와 같은 기능을 가지고 있는 것은 ? [11-4, 19-4] ③
① 접점 ② 가변 저항 ③ 다이오드 ④ 커패시터
[해설] 공압의 체크밸브와 같이 역류 방지 기능을 가지고 있는 것은 다이오드이다.
68. 전기 회로에서 수동 소자가 아닌 것은 어느 것인가 ? [06-4] ④
① 저항 ② 자기 인덕턴스 ③ 커패시턴스 ④ 정전압원
69. 다음 중 릴레이의 기능이 아닌 것은 어느 것인가 ? [12-4] ②
① 전달 기능 ② 선택 기능 ③ 증폭 기능 ④ 변환 기능
[해설] 릴레이의 기능 : ㉠ 전달기능 ㉡ 증폭기능 ㉢ 연산기능 ㉣ 변환기능
70. 전기의 기본이 되는 전하량의 단위는 어느 것인가 ? [15-2, 20-4] ③
① 줄 [J] ② 볼트 [V] ③ 쿨룽 [C] ④ 암페어 [A]
71. 전선의 굵기를 결정하는 3요소가 옳게 짝지어진 것은 ? [17-2] ②
① 전선 허용 저항, 전압강하, 기계적 강도 ② 전선 허용 전류, 전압강하, 기계적 강도
③ 전선 허용 전압, 전압강하, 기계적 강도 ④ 전선내의 발열량, 전압강하, 기계적 강도
72. 다음 회로의 명칭으로 옳은 것은 ? [18-2] ④
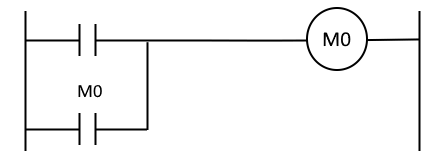
① 인터로크 회로 ② 카운터 회로 ③ 타이머 회로 ④ 자기유지 회로
73. 릴레이를 사용한 전기 제어회로에서 릴레이 자신의 접점을 통해 전기신호를 자신의 릴레이 코일에 계속 흐르게 하여
릴레이 코일의 여자상태를 유지하는 회로는? [18-2] ④
① 동조 회로 ② 비동기 회로 ③ 인터로크 회로 ④ 자기 유지 회로
74. 다음 회로에 대한 설명으로 잘못된 것은 어느 것인가 ? [19-1] ④
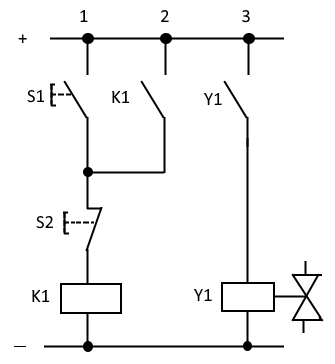
① 리셋 (reset) 우선 자기 유지 회로이다.
② 라인 3의 Y1은 솔레노이드 밸브이다.
③ 스위치 S1은 자기 유지 회로를 구성하기 위한 셋(set) 스위치이다.
④ 라인 2와 3의 접점 K1은 동일한 릴레이의 동일한 접점으로 할 수 없다.
75. 변압기에 관한 설명으로 잘못된 것은 어는 것인가 ? [20-4] ①
① 변압기는 전압과 전류를 바꾸고 있지만 유도 저항에 비례한다.
② 정격 2차 전압에 권수비를 곱한 것을 정격 1차 전압이라 한다.
③ 변압기는 전압과 전류를 바꾸고 있지만 전력으로서는 바꾸지 않는다.
④ 입력에 대한 출력량의 비를 변압기 효율이라 하며, 클수록 효율이 좋다.
[해설] 변압기 (electric transformer) : 전자기 유도 현상을 이용하여 교류의 전압이나 전류의 값을 변화시키는 장치
76. 변압기의 원리로 맞는 것은 ? [19-4] ②
① 자기 유도 작용 ② 전자 유도 작용 ③ 주파수 변조 작용 ④ 정전기 유도 작용
77. 변압기유의 요구사항으로 옳은 것은 ? [20-3] ③
① 산화가 잘 될 것 ② 절연내력이 작을 것
③ 점도가 낮고 비열이 클 것 ④ 인화점과 응고점이 낮을 것
78. 변압기의 특성 중 2차 측의 무부하 전압과 정격 부하시 단자 전압과의 차를 정격 전압을 기준으로 백분율 (%)로 나타
낸 것의 명칭은 ? [17-4] ④
① 변압기의 정격 (rating) ② 실효값 (dffective value) ③ 선간 전압 (line voltage) ④ 전압 변동률 (voltage regulation)
79. 변압기의 결선에 대한 설명 중 옳지 않은 것은 ? [14-2, 19-4] ③
① V-V 결선은 △-△에서 1상을 제거한 것이다.
② △-△결선은 권수비가 같은 단상 변압기 3대를 이용하여 3상 전압 변환을 한다.
③ Y-Y 결선은 성형 결선이라고도 하며 중성점을 접지할 수 없어 유기 기전력에 제3고조파를 포함한다.
④ △-Y, Y-△ 결선은 중성점을 접지할 수 있어 제3고조파 전압이 나타나지 않으나 1차, 2차의 선간전압에는 30° 의 위상차
가 존재한다.
[해설] Y-Y 결선은 성형 결선이라고도 하며 중성점을 접지할 수 있어 유기 기전력에 제3 고조파를 포함한다.
80. 다음 중 동기 전동기의 장점이 아닌 것은 ? [14-2] ①
① 기동시 조작이 용이하다. ② 부하의 변화로 속도가 변하지 않는다.
③ 높은 역률로 운전할 수 있다. ④ 전원 주파수가 일정하면 회전속도도 일정하다.
81. 유도 기전력을 설명한 것으로 잘못된 것은 어느 것인가 ? [11-4, 19-1] ④
① 자속 밀도에 비례한다. ② 도선의 길이에 비례한다.
③ 도선이 움직이는 속도에 비례한다. ④ 도체를 자속과 평행으로 움직이면 기전력이 발생한다.
[해설] 유도 기전력의 발생은 도체를 자속과 직각으로 두고 도체를 움직여 자속을 끊으면 그 도체에서 기전력이 발생한다.
82. 유도 전동기의 특성에 대한 설명으로 옳은 것은 ? [ 18-2] ②
① 회전수는 주파수에 반비례한다. ② 무부하 상태에서 슬립은 1% 이하이다.
③ 동기속도로 회전할 때 슬립 S는 1 이다. ④ 슬립은 회전자 속도가 동기속도에 비해 얼마나 빠른가를 나타낸다.
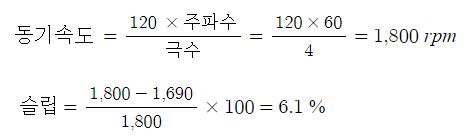
83. 3상 유도 전동기의 동기속도와 슬립을 나타내는 식으로 맞는 것은 ? [14-2] ③
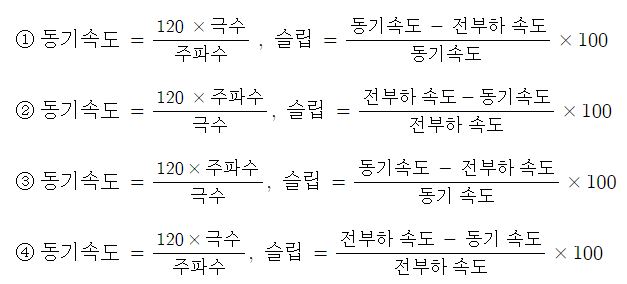
[해설] 4극 3상 유도 전동기의 실제 측정 회전수가 1,690 rpm이라면,
84. 교류 전동기에 속하지 않는 것은 ? [10-4] ④
① 동기 전동기 ② 유도 전동기 ③ 펄스 전동기 ④ 가동 복권 전동기
85. 토크가 증가하면 가장 급격히 속도가 감소하는 전동기는 ? [06-4] ③
① 직류 분권 전동기 ② 직류 복권 전동기 ③ 직류 직권 전동기 ④ 3상 유도 전동기
86. DC 모터의 구성품 중 회전하는 정류자에 전류를 흘려 주는 소모성 접촉물은 어느 것인가 ? [08-4, 15-2] ②
① 코일 ② 브러시 ③ 회전자 ④ 베어링
87. 선형 스텝 모터에서 이송 거리를 S, 스핀들 리드를 h, 회전각이 α일 경우, 다음 중 이송거리에 대한 식으로 옳은 것은
어느 것인가 ? ②

88. 스태핑 모터 (stepping motor)의 일반적인 특징으로 옳은 것은 ? [17-2] ④
① 회전 각도의 오차가 적다. ② 관성이 큰 부하에 적합하다.
③ 진동 및 공진의 문제가 없다. ④ 대용량의 기기를 만들 수 없다.
[해설] 스태핑 모터는 진동 및 공진의 문제가 있고 관성이 큰 부하에 부적합하며, 대용량의 기기를 만들 수 없다.
89. 다음 중 서보 모터 (servo motor)의 전동기 및 제어 장치 구비 조건에 해당하지 않는 것은 ? [12-4] ②
① 고속 운전에 내구성을 가질 것 ② 회전수변동이 크고 토크리플(torque ripple)이 클 것
② 저속 영역에서 안전한 특성을 가질 것 ④ 유지 보수가 용이할 것
[해설] ㉠ 서보 모터
⊙ 응답성이 좋다.
⊙ 제어성이 좋고 정역 특성이 동일하다.
⊙ 빈번한 기동, 정지, 정역 변환 등이 가능하도록 견고하다.
⊙ 물체의 위치나 가도의 추적에 많이 이용된다.
⊙ 서보 모터는 서보 기구에서 조작부이다.
㉡ 서보 모터의 구비 조건
⊙ 속도 응답성이 크고 대출력이며 과부하 내량이 우수할 것
⊙ 제어성이 좋을 것
⊙ 빈번한 시동, 정지, 제동, 역전 등의 운전이 연속적으로 이루어지더라도 기계적 강도가 크고, 내열성이 우수할 것
⊙ 시간 낭비가 적을 것, 기계적인 마찰이 작고, 전기적, 자기적으로 균일할 것
⊙ 정전과 역전의 특성이 같으며 모터의 특성 자체가 안정할 것
⊙ 부착 부위나 사용환경에 충분히 적합할 수 있어야 하며 보수하기에도 용이해야 하지만 높은 신뢰도를 보장할 것
⊙ 관성이 작고, 전기적, 기계 시간 상수가 작아야 하며 회전자의 철심을 없앤 코어리스 (coreless) 구조로 하여 회전
자의 중량을 작게 하거나, 회전자의 지름을 작게 하고 축방향으로 길게 한 구조를 이용할 것
90. 다음 모터의 정 · 역회로에서 사용된 것은 ? [13-4, 18-4] ①
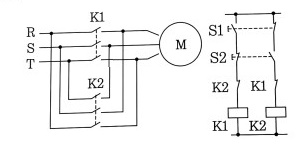
① 인터로크 회로 ② 시간 지연 회로 ③ 양수 안전 회로 ④ 자기 유지 회로
[해설] 정·역 회로에서 하나가 작동하면 다른 동작은 작동하지 못하게 하는 회로이다.
91. 3상 유도 전동기의 슬립을 구하는 식으로 옳은 것은 ? [18-1] ②

92. 3상 유도 전동기가 원래의 속도 보다 저속으로 회전할 경우 원인으로 적절하지 않은 것은 ? [18-4] ②
① 과부하 ② 퓨즈 단락 ③ 베어링 불량 ④ 축받이 불량
93. 3상 전동기의 과열 원인으로 적절하지 않은 것은 ? [12-4, 19-1] ③
① 단상 운전 ② 과부하 운전 ③ 공진 현상 발생 ④ 코일의 단락 또는 군의 단락
[해설] 3상 전동기의 과열 원인
㉠ 3상 중 1상의 접촉 불량 ㉡ 베어링 부위에 그리스 과다 충진 ㉢ 과부하 운전
㉣ 빈번한 기동, 정지 ㉤ 냉각 불충분
94. 단상, 3상 전동기의 고장 중 기동 불능일 때, 다음 중 그 원인으로 가장 거리가 먼 것은 ? [16-4] ③
① 퓨즈 단락 ② 베어링 고착 ③ 전압의 부적당 ④ 내부 결손 오류
[해설] 전압이 높으면 고속, 낮으면 저속으로 회전한다.
#핸들링 #원호보간 #티칭플레이백 #서보레디 #서보알람 #퍼텐쇼미터 #교류 #직류
#다이오드 #커패시터 #쿨룽 #인터로크 #자기유지 #전자유도작용 #전압변동률
#동기속도 #슬립 #토크 #브러시 #스태핑모터 #서보모터 #정역회로 #변압기
'설비보전기사' 카테고리의 다른 글
| 설비 보전 기사 필기 - 핵심 요약 (0) | 2024.02.19 |
|---|---|
| 자동화 시스템의 보전 - 오답 노트 (0) | 2024.02.19 |
| 자동화 시스템 - 오답 노트 -1 (2) | 2024.02.19 |
| 공유압 기호 및 회로 - 오답 노트 (0) | 2024.02.18 |
| 공압기기 - 오답 노트 (2) | 2024.02.18 |
비버리님의
글이 좋았다면 응원을 보내주세요!