1. 순차적 릴레이 코일 ON 방법 (마지막 동작 편솔레노이드)
▣ 이 회로도는 가장 기본이 되는 회로도로서 릴레이 코일이 순차적으로 ON되고 마지막에 릴레이 코일이 순차적으로
OFF되어 초기화 되고 마지막 동작신호가 편솔레노이드로 작동하여 자기유지가 필요없고 전기신호가 OFF된 상태에
서 스프링에 의해 솔레노이드가 작동하는 회로도이다.

① 시작신호 구성 : 시작신호와 가장 마지막 동작신호 a접점을 직렬로 연결한 다음 이를 자기 유지시킨다.

② 첫번째 동작 회로 구성 : 시작신호와 가장 마지막 동작신호 a접점을 직렬로 연결한 다음 이를 자기 유지시킨 다음 마지
막 릴레이 코일 b접점과 직렬로 연결한 다음 이를 첫번째 릴레이 코일에 연결한다.
※ 이것이 첫번째 동작 회로 구성의 공식이다. 이는 외워야 한다.

③ 2~4번째 동작 회로 패턴 : 2~4번째 동작 회로구성 패턴은 시작신호를 자기유지한 다음 이를 이전단계 릴레이 코일
a접점과 직렬로 연결한 다음 릴레이 코일에 연결한다. 패턴이라고 하는 것은 동작이 회로구성이 동일하기 때문이다.
④ 마지막 릴레이 코일이 동작하면 처음단계 코일 부터 순차적으로 OFF되어 초기화된다.
※ 마지막 동작이 편솔레노이드로 작동하는 경우에는 전기신호가 OFF되어도 솔레노이드의 스프링에 의해 작동하므로
기계적 동작을 수행하기 위한 자기유지가 필요없이 솔레노이드를 OFF시키면 된다.
2. 순차적 릴레이 코일 ON 방법 (마지막 동작 양솔레노이드)
▣ 이 회로 구성은 1번 회로 구성과 마찬가지로 릴레이 코일이 순차적으로 ON되었다가 마지막에 순차적으로 일제히
OFF되는 것은 같으나 마지막 동작이 양 솔레노이드로 작동하게 되어 기계적 동작이 끝날 때까지 솔레노이드를
자기유지해 주어야 한다.

① 첫번째 동작 회로 구성 : 시작 신호와 마지막 동작신호 a접점을 직렬로 연결한 다음 이를 자기유지 시키고 이 회로를
마지막 릴레이 코일 b접점과 직렬로 연결한 다음 릴레이 코일에 연결시킨다.

② 2 ~ 4 동작 회로 패턴 : 시작신호를 자기 유지시킨 다음 이를 이전단계 릴레이 코일 a접점과 직렬로 연결한 다음 릴레이
코일에 연결한다.
※ 마지막 릴레이코일 b접점과 이전단계 릴레이 코일 a접점의 역할은 마지막에 일괄 OFF시켜 초기화 하는 것과 다음
단계 신호를 받을 준비를 하는 역할을 한다.
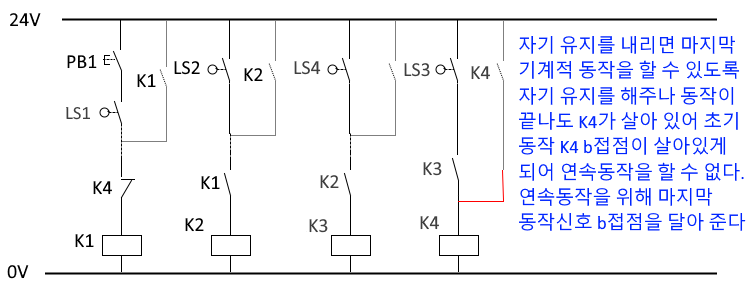
③ 마지막 양솔레노이드 자기 유지 : 2~4번 동작 패턴으로 구성하면 K4가 ON되자 마자 모든 릴레이 코일이 초기화되므로
이를 해결하기 위하여 K4 자기유지를 K3 a접점 아래로 내려 준다. 그런데 이렇게 하면 모든 동작이
끝나면 K4가 ON상태 이므로 초기동작 K4 b접점이 열려 있어 연속동작을 할 수 없게 된다. 이에 대한
조치로 자기유지회로에 마지막 동작 신호의 b접점을 달아 준다.
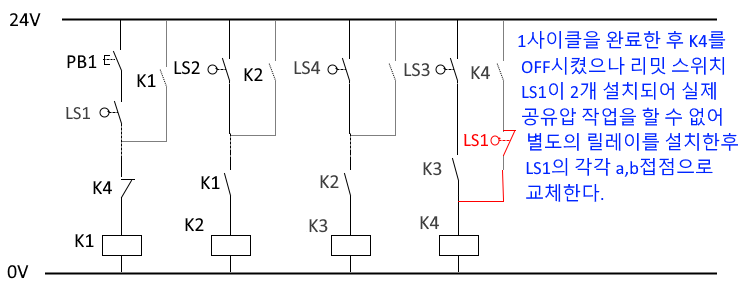
④ 마지막 동작 신호 b접점을 자기유지 회로에 포함시켜 사이클이 마치면 모든 회로가 OFF되어 초기 상태로 되돌릴 수
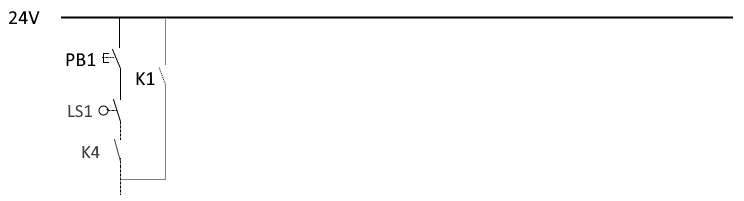
있으나 LS1이 두개가 되어 이는 공유압 작업을 할 수 없게 된다. 이를 해결하기 위해서 별도의 마지막 동작신호 LS1으
로 릴레이 코일을 설치하여 LS1을 이 릴레이 코일 a,b접점으로 대체하여야 한다.

이렇게 양솔레노이드로 마지막 동작을 하게 되면 동작이 끝날 때까지 자기유지를 시켜 주어야 하며 모든 동작이 끝나면 자기유지를 해제할 수 있도록 자기유지 회로에 마지막 동작신호 b접점을 넣어 주어야 하는데 이를 별도의 릴레이를 설치하여 이 릴레이 코일의 a,b접점으로 마지막 동작신호를 대체한다.
3. 순차적 릴레이 코일 ON 방법 (마지막 동작 양솔레노이드) - 2
▣ 이 회로 구성은 1번 회로 구성과 마찬가지로 릴레이 코일이 순차적으로 ON되었다가 마지막에 순차적으로 일제히 OFF
되는 것은 같으나 마지막 동작이 양 솔레노이드로 작동하게 되어 기계적 동작이 끝날 때까지 솔레노이드를 자기유지해
주어야 한다. 그런데 이 방법은 별도의 릴레이 코일을 설치하여 순차적으로 OFF시켜 초기화 한다.

① 첫번째 동작 회로 구성 : 시작신호를 자기 유지한 다음 마지막 릴레이 코일 b접점과 직렬로 연결하는 다음 릴레이 코일
이 연결한다.

② 2 ~ 4 동작 회로 패턴은 시작신호를 자기유지하고 이를 이전 단계 릴레이 코일 a접점과 직렬로 연결한 다음 릴레이 코일
에 연결한다. 이는 앞전 회로구성과 같다.
③ 마지막 릴레이 코일은 솔레노이드 작동을 위한 것이 아니라 회로의 초기화를 위한 것으로 이는 신호를 OFF시키기만
하면 되므로 자기유지를 할 필요는 없다.
4. 각 단계별 하나의 릴레이 코일을 ON시키는 방법 (일반적으로 2개 양솔레노이드)
▣ 이 방법은 동작 단계가 진행되면서 이전 단계의 자기유지를 해제하여 각 단계마다 하나의 릴레이 코일만 여자 (ON)되게
하는 방법으로 일반적으로 양솔레노이드 2개가 설치되는 회로구성이다.
① 시작신호 회로 구성 : 시작신호와 마지막 동작신호 a접점 및 마지막 릴레이 코일 b접점을 직렬로 연결한 다음 이를 자기
유지시킨다.

② 첫번째 동작 회로 구성 : 시작신호와 마지막 동작신호 a접점 및 마지막 릴레이 코일 b접점과 직렬로 연결한 다음 이를
자기유지시키고 이 회로를 다음 단계 릴레이 코일 b접점과 직렬로 연결한 다음 릴레이 코일에
연결한다.

③ 2 ~ 4번째 동작 회로구성 패턴 : 시작신호와 이전단계 릴레이 코일 a접점과 직렬로 연결한 다음 이를 자기유지시키고
이 회로를 다음 단계 릴레이 코일 b접점과 직렬로 연결한 다음 이를 릴레이 코일에 연결한다.
※ 이전 단계 코일의 a접점은 시작준비, 다음 단계 코일의 b접점은 자기유지 해제기능을 한다.

④ 2~4번 동작 패턴 회로를 구성하면 처음 시작회로 구성에서 K4 a접점이 Open 상태가 되어 동작이 되지 않는다. 이를
해결하기 위하여 마지막 릴레이 코일 K4 자기 유지 회로에 병렬로 a접점 버튼을 추가하여 K4를 자기 유지하여 첫번째
동작의 시작준비를 마쳐야 한다. 이 때 PB2의 기능은 첫번째 동작의 시작준비 기능을 한다.
5. 릴레이 코일 하나로 구동하는 방법 (통상 양솔레노이드 2개로 구성)
▣ 이 회로구성은 전원선을 그룹으로 나누어 솔레노이드의 개수를 최소화하는 방법이며 실무상으로 많이 사용되지 않으나
설비보전기사 문제로 종종 출제된다.

① 먼저 동작을 그룹으로 나눈다. 그룹내에는 한개의 실린더의 2개 동작을 포함해서는 안된다. 또한 그룹을 나누는
시작신호와 각 동작을 구분하는 시작신호를 구분한다.

② 그룹을 나눈 후에 각각의 그룹에는 전원선을 따로 구성한다.

③ 먼저 시작신호와 함께 첫번째 동작 회로를 구성한 다음 이를 릴레이 코일에 연결하고 이 릴레이 코일로 a, b접점으로
그룹 전원선을 구분한다.

④ 시작신호 회로 구성 : 시작신호와 마지막 동작 신호 a접점을 직렬로 연결한 다음 이를 자기유지 시킨다.

⑤ 첫번째 동작 회로 구성 : 시작신호와 마지막 동작신호 a접점을 직렬로 연결한 다음 이를 자기 유지시키고 이 회로를
그룹 구분 동작신호 b접점과 직렬로 연결한 다음 릴레이 코일에 연결한다.
※ 이 때 그룹 구분 동작신호는 한개의 릴레이 코일을 2개의 릴레이 코일 역할을 하도독 하는 기능을 한다.

이상의 회로를 정리하면 위 그림과 같다.
#회로설계 #공유압 #설비보전기사 #실기 #작업형 #릴레이코일 #솔레노이드 #릴레이
#접점 #시작신호 #동작코일 #자기유지 #인터록
'설비보전기사 실기' 카테고리의 다른 글
| 전기 공기압 회로 설계 및 구성 작업 문제 14 - 설비 보전기사 (2) | 2024.03.23 |
|---|---|
| 전기 공기압 회로 설계 및 구성 작업 문제 13 - 설비 보전 기사 (0) | 2024.03.20 |
| 전기 공기압 회로 설계 및 구성 작업 문제 12 - 설비 보전 기사 (0) | 2024.03.19 |
| 전기 공기압 회로 설계 및 구성 작업 문제 11 - 설비 보전 기사 (0) | 2024.03.19 |
| 전기 공기압 회로 설계 및 구성 회로 문제 10 - 설비보전기사 (10) | 2024.03.19 |