
▣ 트랜스퍼 머신 (Transfer machine) : 기계적 자동화에서 단일 제품의 연속 생산을 목적으로 하고 가공 순서에 따라 연속
적으로 배치하여 자동 운반 장치에 의해 유기적으로 결합한 방식으로 공장 전체의 완전 자동화를 의미한다.
부분품 가공이나 조립, 검사 따위를 연속하여 자동적으로 처리하는 장치. 전자계산기가 시스템 전체를 능률적으로
제어하며, 자동차ㆍ카메라 따위의 대량 생산에 사용한다.
▣ 머시닝 센터 (Machining center) : 단일 제품의 양산 목적으로 설계된 자동 생산 시스템으로 다품종 소량 생산을 한다.
이 시스템은 수치제어 (numerical control)의 공작기계, 자동 공구 교환 장치, 가공품의 자동 부착, 제거 장치, 적응
제어 (adaptive contrlol) 장치 등을 유기적 관계를 갖는 하나의 시스템으로 결합 시킨 것이다.
머시닝 센터는 CNC밀링 머신에 툴 체인저 등의 장치가 붙어 있어서 자동 툴 교환 기능이 있는 것을 말한다. 드릴링
머신, 보링 머신, 밀링 머신을 통합하여 수치를 제어할 수 있다. 두 가지 이상의 작업을 동시에 할 수 있고, 자동으로
공구를 교환할 수 있는 ATC(Automatic Tool Changer)와 APC(자동 부품 교환 장치)가 부착되어 있다.
터닝센터가 공작물이 회전하고 공구가 고정된 개념이라면 머시닝 센터는 공구가 회전하고 공작물이 고정되어 있는
방식이다.
▣ 프로세스 자동화 (Process automation) : 석유 공업, 화학 공업, 시멘트 공업 등의 장치 공업에서 활용하는 것으로 주로
액체, 기체, 분체와 같은 유체 또는 이와 비슷한 것을 화학적 · 물리적으로 처리한다.
▣ 자동화 시스템
⊙ 자동화 시스템은 입력부와 제어부, 출력부로 구성되어 있고, 액추에이터 (actuator, 작동부)와 센서 (semsor) 및 제어
신호 처리 장치 (signal process)로 구성된다.
⊙ 자동화 5대요소 : 센서, 프로세서, 액추에이터, 소프트 웨어, 네트워크
▣ 저투자성 자동화 (LCA : Low cost automation)
⊙ 비용이 적게 드는 자동화 : 운영 및 유지 보수가 간단하고 적당한 정도의 노력이 필요함
▣ 유연 생산 시스템 (FMS : flexible manufacturing system)
⊙ FMS (Flexible manufacturing system) : 1대의 NC (numerical control, 수치제어) 공작 기계를 햄심으로 하여 자동 공구
교환 장치 (ATC : automatic tool change), 자동 펠릿 교환장치 (APC), 펠릿 매거진을 배치한 것
⊙ 전형적 FMS : 복수의 NC 공작 기계가 가변 루트인 자동 반송 시스템으로 연결되어 유기적으로 제어
⊙ FTL (Flexible transfer line) : 다축 헤드 교환 방식 등의 유연한 기능을 가진 공작 기계군을 고정 루트인 자동 반송 장치
로 연결한 것
<제어 시스템의 분류>
가. 제어 정보 표시형태에 의한 분류
▣ 아날로그 제어계, 디지털 제어계, 2진 제어계
나. 신호처리 방식에 의한 분류
① 동기 제어계 (synchronous control system) : 시간과 관계된 신호에 의해 제어됨
② 비동기 제어계 (asynchronous control system) : 시간과는 관계없이 입력 신호의 변화에 의해서 제어됨
③ 논리 제어계 (logic control system) : 요구되는 입력 조건이 만족되면 그에 상응하는 신호가 출력되는 제어시스템
④ 스퀀스 제어계 (sequence control) : 미리 정해진 순서대로 제어 신호가 출력되어 순차적인 제어를 행하는 제어시스템
다. 제어 과정에 따른 분류
① 파일럿 제어 (pilot control) : 요구되는 입력 조건이 만족되면 그에 상응하는 출력 신호가 발생되는 형태가 요구된다.
② 메모리 제어 (memory control) : 어떤 신호가 입력되어 신호가 발생한 후에 입력 신호가 없어져도 그 때의 출력 상태를
유지하는 제어계
③ 시간에 따른 제어 (time schedule control) : 제거가 시간의 변화에 따라 행해여 진다.
④ 조합 제어 (coordinated motion control) : 목표치 (command variable)가 캠 축이나 프로그래머에 의해 주어지나 그에
상응하는 출력 변수는 제어계의 작동 요소에 의해 영향을 받는다.
⑤ 시퀀스 제어 (sequence control) : 전 단계의 작업 완료 여부를 리밋 스위치나 센서를 이용하여 확인한 후 다음 단계의
작업을 수행하는 것으로서 공장 자동화에 가장 많이 이용되는 제어계
<제어와 자동제어>
① 제어 (control) : 시스템내의 하나 또는 여러 개의 입력 변수가 약속된 법칙에 의하여 출력 변수에 영향을 미치는 공정 :
개회로 시스템 (Open loop control system)
② 자동제어 (automatic control) : 제어하고자 하는 하나의 변수가 계속 측정되어서 다른 변수, 즉 지령치와 비교되며
그 결과가 첫 번째의 변수를 지령치에 맞추도록 수정을 가하는 제어 시스템 :
폐회로 시스템 (Close loop control system)
③ 피드백 제어 (feedback control) : 피드백에 의하여 제어량과 목표값을 비교하고 그들이 일치되도록 정정 동작을 하는
제어 시스템
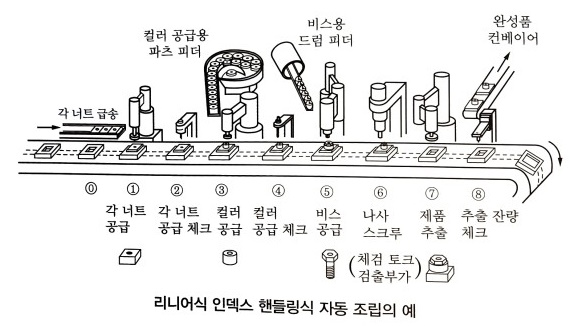
<핸들링 (handling)>
① 직진 인덱싱 핸들링 : 직진 인덱싱 (linear indexing handling)은 스트립 (strip) 또는 로드 형상의 재질이 그 재질 전체의
길이에 거쳐 부분적인 공정이 이루어지는 작업에 적합하다.

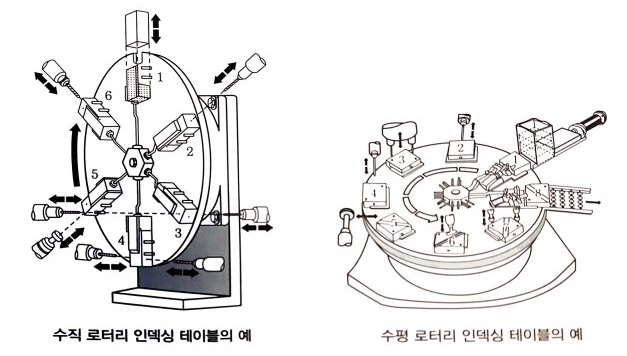
② 로터리 인덱싱 : 로터리 인덱싱 (rotary indexing)은 하나의 가공물에 여러 개의 가공 공정이 진행되어야 할 때 유용하다.
가공물은 한 번 이송되면 모든 가공작업이 완료될 때까지 그 작업 위치를 유지하며, 가공물이 위치한
이송체가 회전하면서 가공공정은 수행할 공구에 가공물을 순서적으로 접근시킨다. 이 로터리 인덱싱
테이블은 최소 2개 이상의 가공물을 이송하여 반복되는 클램핑, 클램핑 해제 공정 필요 없이 한 위치에
서 연소되는 가공 공정을 완료한다.
【 출제 예상 문제 】
1. 자동화 시스템을 사용하는 일반적인 목적이 아닌 것은 ? [12-4] ④
① 생산성 향상 ② 원가의 절감 ③ 품질의 균일화 ④ 생산 설비의 고급화
2. 자동화 시스템의 5대 요소에 속하는 것이 아닌 것은 ? [11-4] ④
① 센서 ② 프로세서 ③ 액추에이터 ④ 하드웨어
3. 다음 자동화 장치의 기본적인 구성 중 입력되는 제어 신호를 분석 · 처리하여 필요한 제어 명령을
내려 주는 것은 ? [20-3] ④
① 센서 (sensor) ② 프로그램 (program)
③ 액추에이터 (actuator) ④ 시그널 프로세서 (signal processor)
4. 센서로 부터 입력되는 제어 정보를 분석 · 처리하여 필요한 제어 명령을 내려 주는 장치인 제어 신호 처리 장치의
명칭은 ? [18-1] ②
① 네트 워크 ② 프로세서 ③ 하드웨어 ④ 액추에이터
[해설] 센서로 부터 입력되는 제어 정보를 분석 · 처리하여 필요한 제어 명령를 내려 주는 장치인 제어 신호 처리 장치를
프로세서라 하며, PLC는 프로세서의 한 종류이다.
5. 자동화의 기본 요소가 아닌 것은 ? [20-3] ③
① 감지 장치 ② 작동 장치 ③ 저장 장치 ④ 제어 장치
6. 연속적인 물리량인 온도를 측정하는 열전대의 출력 신호의 형태는 ? [12-4, 18-4] ④
① 2진 신호 ② 전류 신호 ③ 디지털 신호 ④ 아날로그 신호
[해설] 열전대의 출력 신호는 아날로그 전압 신호이다.
7. 공장 자동화 시스템의 일반적인 공정 순서로 옳은 것은 ? [14-4] ②
① 가공 - 설계 - 조립 - 보관 - 출하 ② 설계 - 가공 - 조립 - 보관 - 출하
③ 출하 - 가공 - 조립 - 보관 - 설계 ④ 설계 - 보관 - 조립 - 가공 - 출하
8. 자동화 시스템의 자동화가 적용되는 분야나 산업별로 구분한 것이 아닌것은? [19-1] ④
① OA (office automation) ② HA (Home automation)
③ FA (factory automation) ④ LCA (low cost automation)
[해설] LCA (Low cost automation)는 저투자성 자동화, 즉 경제적 분류이다.
9. 자동화 시스템 중 센서로 부터 입력되는 제어 정보를 분석 처리하여 필요한 제어 명령을 내어 주는 장치는 ? [15-2] ③
① 액추에이터 ② 신호 입력 요소 ③ 제어 신호 처리장치 ④ 네트워크 장치
10. FMS (flexible manufacturing system)에서 추구하는 생산 방식은 ? [14-2] ③
① 수공업 생산 ② 대량 생산 ③ 다품종 소량 생산 ④ 단순 공구 사용 생산
[해설] FMS (flexible manufacturing system) : 유연 생산 시스템에서 추구하는 생산 방식은 다품종 소량 생산 방식이다.
11. 다품종 생산을 위한 유연성 생산 시스템을 무엇이라 하는가 ? [09-4] ②
① FA ② FMS ③ CIM ④ IMS
[해설] FMS: 다양한 제품을 동시에 처리하고 높은생산성 요구에 대응하는 생산관리시스템
12. 다음 FMS 형태 중 생산성이 가장 좋은 방법은 ? [17-4] ③
① 전형적 FMS ② Job-shop형 ③ 트랜스퍼 라인 ④ 플렉시블 생산 셀 (FMC)
[해설] 트랜스퍼 라인은 유연성은 가장 떨어지나 생산량은 가장 많다.
13. 센서의 종류 중 용도에 따른 분류에 속하지 않는 센서는 ? [11-4] ④
① 제어용 센서 ② 감시용 세서 ③ 검사용 센서 ④ 광학적 센서
[해설] 제어용, 감시용, 검사용은 용도에 따른 분류이고, 광학적은 변환원리에 따른 분류이다.
14. 리드 스위치 (reed switch)의 일반적인 특성이 아닌 것은 ? [16-4] ④
① 소형, 경량이다. ② 스위칭 시간이 짧다. ③ 반복 정밀도가 높다. ④ 회로 구성이 복잡하다.
[해설] 리드 스위치 (reed switch)는 가는 접점이라는 의미로 전화 교환기용의 고신뢰도 스위치로 개발되어 현재는 자석과
조합한 자석 센서로 광범위하게 사용되고 있다. 실린더에 부착하여 소형화 할 수 있으며, 물체에 직접 접촉하지
않고 동작을 위한 별개의 전원을 부가할 필요가 없이 그 위치를 검출하여 전기적 신호를 발생시키는 장치 로
자동화에 많이 응용되고 있다.
⊙ 리드 센서의 특징
㉠ 접점부가 완전히 차단되어 있으므로 가스나 액체 중, 고온 고습 환경에서 안정하게 동작한다.
㉡ ON/OFF 동작 시간이 비교적 빠르고 ( t <1μs), 반복 정밀도가 우수하여 (± 0.2 ㎜) 접점의 신뢰성이 높고 동작 수명이
길다.
㉢ 사용 온도 범위가 넓다. (-270 ~ +150 ℃)
㉣ 내전압 특성이 우수하다. ( > 10 kV)
㉤ 리드의 겹친 부분은 전기 접점과 자기 접점으로의 역할도 한다.
㉥ 가격이 비교적 저렴하고, 소형, 경량이며, 회로가 간단해진다.
㉦ 인접한 거리에서의 연속된 리드 스위치 사용을 허용하지 않는다.
15. 제어 시스템은 요소 - 신호 입력 요소 - 신호 처리 요소 - 신호 출력 요소로 구성되는 신호 전달 체계를 갖는다. 전기
회로 구성 요소 중에서 푸시 버튼 스위치는 신호 전달 체계에서 어느 부분에 해당되는가 ? [07-4] ②
① 에너지 요소 ② 신호 입력 요소 ③ 신호 처리 요소 ④ 신호 출력 요소
16. 어떤 목적에 적합하도록 되어 있는 대상에 필요한 조작을 가하는 것을 무엇이라 하는가 ? [19-1] ①
① 제어 ② 시스템 ③ 자동화 ④ 신호처리
[해설] 제어 (control) : "시스템 내의 하나 또는 여러 개의 입력 변수가 약속된 법칙에 의하여 출력 변수에 영향을 미치는
공정"으로 제어를 정의하고, 개회로 제어 시스템 (open loop control system) 특징을 갖는다.
17. 요구되는 입력 조건이 충족되면 그에 상응하는 출력 신호가 나타나는 제어는 무엇인가 ? [13-4, 17-2] ③
① 동기 제어 ② 비동기 제어 ③ 논리 제어 ④ 시퀀스 제어
[해설] ㉠ 논리회로 : AND, OR, NOT 등의 논리 기능을 가진 회로
㉡ 기능 선도 : AND, OR, 스텝부, 명령부의 명령을 이용하여 순차 제어를 표시하는데 적절하게 쓰이는 동작 상태 표현법
으로 제어 문제를 표시하는 방법 중 하나로 널리 사용되고 있으며, 특히 순차 제어 문제를 표시하는데
적절한 방법이다. 스텝을 표시하는 부분은 두개 부분으로 A는 스텝 번호, B에는 주석이 기록된다.
18. 다음 중 AND 논리의 공압식 표현이 아닌 것은 ? [18-1] ④

① ㉠ ② ㉡ ③ ㉢ ④ ㉣
19. 입력 신호와 출력 신호가 서로 반대의 값으로 되는 논리는 ? [15-2, 19-2] ③
① OR ② AND ③ NOT ④ XOR
[해설] NOT : 논리 제어에서 입력이 존재하지 않을 때에만 출력이 존재하는 논리
19. 다음 공기압회로에서 입력 A와 B에 대한 출력Y의 동작과 같은 논리회로는? [20-3] ③
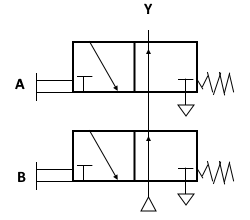
① AND ② NOR ③ NOT ④ NAND
21. 다음 중 입력 X1 = 1, X2 = 0 일 때 또는 X1 = 0 이고 X2 = 1 인 경우에만 출력이 나오는 공압회로는 ? [06-4] ③
① NOT 회로 ② NOR ③ XOR ④ NAND
22. 다음 중 신호를 기억할 수 있는 회로는 어느 것인가 ? [14-2] ④
① AND 회로 ② OFF 회로 ③ OR 회로 ④ 플립플롭 회로
[해설] 플립 플럽 회로는 신호와 출력의 관계가 기억 기능을 겸비한 것이다.
23. 실제의 시간과 관계된 신호에 의하여 제어가 행해지는 제어계는 ? [17-4] ②
① 논리 제어계 ② 동기 제어계 ③ 비동기 제어계 ④ 시퀀스 제어계
[해설] 동기 제어계 (synchronous control system) : 실제의 시간과 관계된 신호에 의하여 제어가 행해지는 시스템이다.
24. 시간과 관계없이 입력 신호의 변화에 의해서만 제어가 행해지는 제어계는 어느 것인가 ? [16-4, 20-4] ③
① 논리 제어계 ② 동기 제어계 ③ 비동기 제어계 ④ 시퀀스 제어계
[해설] 시간에 관계없이 동기 제어, 관계 없으면 비동기 제어계이다.
25. 다음 자동제어 중에서 개회로제어 (Open loop control)에 해당하는 것은? [07-4] ①
① PLC 에 의한 공압 솔레노이드 밸브 제어 ② CNC 공작 기계 이송 테이블 제어
③ 수직 다관절 로봇의 모션 제어 ④ 서보 모터를 이용한 단축 위치 제어
[해설] 제어 (control) : "시스템 내의 하나 또는 여러개의 입력 변수가 약속된 법칙에 의하여 출력 변수에 영향을 미치는
공정"으로 제어를 정의하고, 개회로 제어 시스템 (open loop control system) 특징을 갖는다.
26. 제어 동작이 출력 상태와 무관하게 이루어지는 제어 시스템으로서 제어 장치로 구성된 각 기기들은 자기에게 정해진
작업만을 수행하며 외란에 의한 오차에 대처할 능력이 없는 제어 방식은 ? [06-4] ①
① 오픈 루프 제어 ② 클로즈드 루프 제어 ③ 아날로그 제어 ④ 디지털 제어
27. 다음은 개회로 제어에 대한 설명이다. 맞는 것은 ? [08-4] ④
① 오차에 적절히 대처하는 능력이 있다. ② 오차를 자동적으로 대처해 나간다.
③ 피드백 신호를 통해 목표값에 도달한다. ④ 외란에 의해서 발생되는 오차에 대한 대처 능력이 없다.
28. 제어하고자 하는 하나의 변수가 계속 측정되어 다른 변수, 즉 지령치와 비교되며 그 결과가 첫번째의 변수를 지령치에
맞도록 수정하는 제어 방법이 아닌 것은 ? [19-4] ③
① servo 제어 ② feed - back 제어 ③ open - loop 제어 ④ closed-loop 제어
[해설] open - loop 제어만 개회로 제어이며, 나머지는 되먹임 제어이다.
29. 제어 프로그램에 의해 정해진 작업 순서대로 순차적으로 공정이 진행되는 회로는 어느 것인가 ? [15-4] ①
① 시퀀스 제어 ② 메모리 제어 ③ 파일럿 제어 ④ 시간에 따른 제어
30. 다음은 시퀀스 제어에 관한 설명이다. 잘못된 것은 ? [06-4] ①
① 피드백 신호가 반드시 있어야 한다. ② 입력신호가 필요하다.
③ 순차적인 제어 출력을 발생한다. ④ 프로그램 제어의 한 형태이다.
[해설] 시퀀스 제어는 피드백이 없다.
31. 전 단계의 작업 완료 여부를 리밋 스위치 또는 센서를 이용하여 확인한 후 다음 단계의 작업을 수행하는 것으로서 공장
자동화 (FA)에 많이 이용되는 제어 방법은 ? [18-2] ②
① 메모리 제어 ② 시퀀스 제어 ③ 파일럿 제어 ④ 시간에 따른 제어
[해설] 시퀀스 제어는 전체 계통에 연결된 스위치가 동시에 동작할 수 있다.
32. 제어 동작이 출력 상태와 무관하게 이루어지는 제어 시스템으로서 제어 장치로 구성된 각 기기들은 자기에게 정해진
작업만을 수행하며 외란에 의한 오차에 대처할 능력이 없는 제어방식은 ? [06-4, 19-1] ③
① 디지털 제어 (digital control) ② 아날로그 제어 (analog control)
③ 오픈 루프 제어 (open loop control) ④ 클로즈드 루프 제어 (closed loop control)
33. 다음 제어 방식 중 의미가 다른 하나는 어느 것인가 ? [19-2] ②
① 궤한 제어 ② 개루프 제어 ③ 폐루프 제어 ④ 피드백 제어
[해설] 제어, 오픈 루프 제어, 개회로 제어, 개루프 제어는 같은 용어이며, 피드백 제어, 폐루프 제어, 되먹임 제어, 궤환 제어
등은 자동 제어를 의미한다.
34. 다음 중 자동 제어에 해당하는 작업은 어느 것인가 ? [16-2] ③
① 실린더 전 · 후진 위치에 리밋 스위치를 설치하여 반복 작업을 한다.
② 요동형 액추에이터에 센서를 설치하여 제한된 각도에서 반복적으로 회전운동을 한다.
③ 아크 용접 로봇이 서보 모터를 이용하여 입력된 경로대초 용접 작업을 수행한다.
④ 램이 회전 운동을 하면서 리밋 스위치를 작동시키면 그신호을 받아 실린더를 동작한다.
35. 속도, 전압 등과 같은 제어량에 대해 일정한 희망치를 계속적으로 유지시키는 제어는 ? [14-4, 18-1] ③
① 논리 제어 ② 개회로 제어 ③ 피드백 제어 ④ 릴레이 시퀀스 제어
36. 되먹임 제어에 대한 설명으로 잘못된 것은 어느 것인가 ? [19-4] ③
① 닫힘 루프 제어라고도 한다.
② 피드백 신호를 통해 목표값에 도달한다.
③ 외란에 의해서 발생되는 오차에 대한 대처 능력이 없다.
④ 안정도, 대역폭, 감도, 이득 등의 제어 특성에 영향을 미친다.
[해설] 되먹임 제어는 외란에 의해서 발생되는 오차를 계속 수정하여 목표값에 도달한다.
37. 외란의 영향에 대하여 이를 제거하기 위한 적절한 조작을 가하는 제어는 ? [19-2] ④
① 동기 제어 ② 비동기 제어 ③ 시퀀스 제어 ④ 폐회로 제어
[해설] 폐회로 제어 : 외란에 의해서 발생되는 오차를 계속 수정하여 목표값에 도달한다.
38. 되먹임 제어 (feed back) 제어의 설명 중 잘못된 것은 ? [14-4] ③
① 정확성이 증가하고 대역폭이 증가한다. ② 계의 특성 변화에 대한 입력 대 출력비의 강도가 감소한다.
③ 구조가 간단하고 설치비가 싸다. ④ 비선형과 외형에 대한 효과가 감소한다.
[해설] 되먹임 제어는 구조가 복잡하고, 설치비가 고가이다.
39. 다음 중 서보 제어의 의미로 옳은 것은 어느 것인가 ? [11-4, 17-2] ④
① 증폭 제어 ② 느린 정밀 제어
③ 오픈(open) 회로 제어 ④ 빠르고 정확한 폐회로 제어
[해설] 서보란 servant (하인)에서 유래된 것으로 빠르고 정확한 피드백 제어를 의미한다.
40. 일상 생활이나 산업 현장에서의 피드백 제어에 해당되는 작업은 ? [17-4] ④
① 아파트 현관 램프가 일정 시간 동안 켜졌다가 저절로 꺼진다.
② 4/2 - way 밸브를 조작하여 공압 실린더로 목재를 클립핑한다.
③ 유량 제어 밸브를 사용하여 유압 모터의 축을 일정한 속도로 회전시킨다.
④ 아크 용접 로봇이 AC 서보 모터를 이용하여 지정된 용접선을 따라 용접한다.
41. 시스템의 특성을 나타내는 라플라스 변환식에서 입력과 출력의 관계를 나타내는 것은 ? [06-4] ①
① 전달함수 ② 도함수 ③ 피드백 ④ 블리드 오프
42. 다음 주파수 응답의 도시법 중 보드 선도에 대한 설명으로 맞는 것은 ? [06-4] ④
① 각 주파수가 "0" 에서 부터 "∞" 까지 주파수 전달 함수의 궤적이다.
② 주파수 전달함수에 대하여 자연로그를 취한 후 10배 한 값으로 정한다.
③ 일반적으로 이득을 가로 축, 각 주파수를 세로 축에 표시한다.
④ 각 주파수의 값에 대한 주파수 전달함수의 크기 및 위상각의 곡선이다.
43. 피드백 제어계의 응답 특성을 설명한 것으로 옳은 것은 ? [15-4] ③
① 응답이 처음으로 희망값에 도달하는 시간은 응답시간이다.
② 응답이 정해진 허용 범위 이내로 정착되는 시간은 상승시간이라 한다.
③ 응답 중에 생기는 입력과 출력의 최대 편차량은 오버 슈트이다.
④ 응답이 최초로 희망값의 70.7 %에 도달하는데 필요한 시간은 지연 시간이다.
[해설] 응답이 허용 오차 범위 내에 들어가며 허용 오차 범위를 벗어나지 않는 최초의 시간을 정정 시간, 계단 응답이 최종
값의 10에서 90%까지 도달하는데 필요한 시간으로 정의하는 것 또는 계단 응답이 최종값의 50%에 도달했을 때
기울기의 역수를 상승시간이라고 한다.
44. 자동제어에 있어서 보도 선도는 주파수와 진폭비 및 위상지연을 나타낸다. 보통의 시스템에서 나타나는 진폭비와 위상
지연은 얼마로 보는가 ? [14-2, 19-4] ①
① -3dβ, 90도 ② -6dβ, 120도 ③ -1.5dβ, 45도 ④ -9dβ, 60도
[해설] 자동제어의 기준점으로 진폭비(입력대 출력비)는 보통 -3dβ, 2계 미분 방정식의 위상 지연이다.
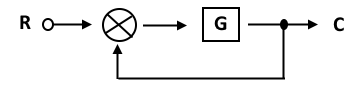
45. 다음 그림과 같은 블록 선도에서 종합 전달함수 C/R는 ? [09-4, 14-2, 19-4] ②

46. 응답은 매우 빠르지만 단독으로 사용하지 않는 제어방법은 ? [15-2] ③
① P 제어 ② I 제어 ③ D 제어 ④ K 제어
[해설] P 제어는 비례제어, I 제어는 적분 제어로 리셋 제어라고도 한다. D 제어는 미분 제어 또는 레이트(rate) 제어라고
하며 입력의 변화 속도에 비례하는 출력을 내는 제어로 단독으로 사용할 수 없고, P 또는 PI와 같이 사용한다.
47. 미분 조절기로서 제어 편차의 증가율이 제어 변수의 값이 되는 제어방법은 ? [19-2] ①
① D동작 ② I 동작 ③ K 동작 ④ P 동작
[해설] D 제어는 미분 제어 또는 레이트 (rate) 제어라 하며, 입력의 변화 속도에 비례하는 출력을 내는 제어로 단독으로
사용할 수 없고, P 또는 PI 와 같이 사용한다.
48. PD 제어에 있어서 에러를 없애 주는 제어장치는 ? [07-4, 14-4, 18-4] ④
① 증폭기 ② 비례 제어기 ③ 미분 제어기 ④ 적분 제어기
49. 제어 시스템은 에너지 요소, 신호 입력 요소, 신호 처리 요소, 신호 출력 요소로 구성되는 신호 전달 체계를 갖는다.
전기 회로 구성 요소 중에서 푸시 버튼 스위치는 신호 전달 체계에서 어느 부분에 해당되는가 ? [07-4, 17-2] ②
① 에너지 요소 ② 신호 입력 요소 ③ 신호 처리 요소 ④ 신호 출력 요소
50. 다음 중 PLC 장비의 설치 환경 조건으로 적합한 것은 ? [07-4, 15-2] ③
① 제어기 주변 온도가 -30 ~ 0 ℃ 가 유지되어야 한다.
② 소자의 성능 저하 방지를 위해 주위 고습도를 유지한다.
③ 급격한 온도의 변화로 이슬 맺힘이 없어야 한다.
④ 분진과 진동이 발생하는 장비가 가까이 있어야 한다.
51. PLC (programmable logic controller)의 출력 인터 페이스에 사용할 수 없는 것은 ? [18-2] ③
① 램프 (lamp) ② 릴레이 (relay)
③ 리밋스위치 (limit switch) ④ 솔레노이드 밸브 (solenoid valve)
[해설] 리밋 스위치는 입력 요소이다.
52. PLC 에서 출력 신호는 존재하는데, 공압 실린더가 움직이지 않을 때, 그 원인으로 적절하지 않은 것은 ? [10-4, 18-1] ③
① 전선이 단선되어 있다. ② 밸브의 솔레노이드가 소손되었다.
③ 공기중에 수분 함유량이 보통 보다 적다. ④ 공급 압력이 게이지 압력으로 0bar를 지시하고 있다.
[해설] 출력신호가 있는 것도 전압이 발생한다는 것이고, 이는 전선으로 솔레노이드와 연결되어 있어야 실린더의 동작이
가능하다. 따라서 실린더가 움직이지 않는 것도 이 과정에서의 문제이므로 전선, 솔레노이드를 확인하여야 하고
여기에 문제가 없으면 솔레노이드 밸브의 스풀 등에 의하여 작동이 안 되는지 또, 여기에도 문제가 없으면 실린더에
압축공기 공급 여부 (압력), 실린더 내부 누설, 실린더의 부하 등을 확인하여야 한다.
53. 처리 장치의 기능을 하나 혹은 몇 개의 반도체 칩에 집적한 것은 무엇인가? [06-4] ③
① 제어용 컴퓨터 ② 마이크로 컴퓨터 ③ 마이크로 프로세서 ④ 디지털 제어
54. 서로 이웃한 컴퓨터와 터미널을 연결 시킨 네트 워크 구성 형태이며, 통신 회선 장애가 있거나 하나의 제어기라도 고장
이 있을 때에는 모든 시스템이 정지될 수 있는 네트워크는 ? [ 08-4, 18-2] ②
① 성형 (star) ② 환형 (ring) ③ 트리형 (tree) ④ 망형 (mesh)
55. 핸들링의 정의로 옳은 것은 ? [20-3] ④
① 소재에 소정의 치수, 형상, 정도, 성능 등을 부여하는 공정이나 작업
② 두개 이상의 부품에서 1개의 반제품 또는 제품을 만드는 고정이나 작업
③ 완성된 제품이나 프로세스가 정해진 목적에 합치하는가를 확인하는 공정이나 작업
④ 물체를 외관적으로 변화시키지 않고 필요할 때에 필요한 장소에 이동, 운반, 저장, 보관시키는데 관련된 공정이나 작업
#자동화 #시퀀스 #센서 #액추에이터 #프로세서 #열전대 #리드스위치 #논리회로 #동기제어계 #피드백제어 #비례제어 #적분제어 #미분제어 #파일럿제어 #되먹임제어 #논리곱
#오픈시스템 #폐루프제어 #개루프제어 #전달함수 #아날로그제어 #디지털제어 #논리합
'설비보전기사' 카테고리의 다른 글
| 자동화 시스템의 보전 - 오답 노트 (0) | 2024.02.19 |
|---|---|
| 자동화 시스템 오답 노트 - 2 (6) | 2024.02.19 |
| 공유압 기호 및 회로 - 오답 노트 (0) | 2024.02.18 |
| 공압기기 - 오답 노트 (2) | 2024.02.18 |
| 유압기기 - 오답노트 (2) | 2024.02.18 |