
앞서 유도전동기의 직입기동, 감전압기동, Soft Starter에 대해 알아 보았다.
인버터를 사용해서 유도전동기를 기동하면
앞에서 확인해 본 기동법들 보다 많은 장점을 가지게 된다.
유도전동기 인버터 기동에 대해 알아 보자
1. Converter(컨버터)와 Inverter(인버터)
Converter(컨버터)는 전력변환기이다.
교류를 직류로, 직류를 교류로, 교류를 교류로, 직류를 직류로 바꾸는 장치
모두 컨버터라고 부른다.
1) 교류 ⇒ 직류 : 정류기 (Rectifier)
2) 교류 ⇒ 교류 : 사이클로 컨버터 (Cycloconverter) - 직접 주파수 변환 장치
3) 직류 ⇒ 교류 : 인버터 (Inverter)
과정에 따라 종류가 달라지지만 모두 컨버터이다.
컨버터와 인버터는 반대말이 아니고
인버터는 컨버터 중 직류를 교류로 바꾸는 장치이다.
인버터 구동회로를 이용하면 유도전동기의 기동, 정지, 속도제어에 관여할 수 있다.
2. 유도전동기 Inverter(인버터) 구동회로 구조 및 역할
발전기에서 받은 3상 교류전원은 인버터 구동회로를 거친 후 유도전동기의 고정자에
공급되어 유도전동기를 회전하게 한다.
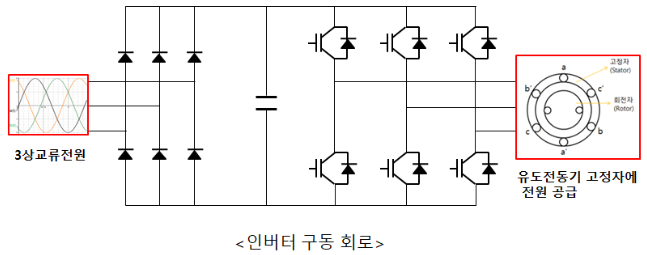
인버터 구동회로는 (1) 정류회로 (2) 평활회로 (3) 인버터 회로로 나눠진다.

(1) 정류회로
교류전원 +값과 -값을 오고 가는데 정류회로에서 다이오드를 이용하면 한
방향으로만 흐르게 할 수 있다.
위의 인버터 구동회로에서는 3상 전파정류회로를 이용하였다.
(정류회로에 일반 다이오드를 사용하게 되면 평활회로로 갈 때 전압이 1.35배가 된다.
만약 이 값을 조절하고 싶다면 제어다이오드인 SCR을 사용하면 된다.
SCR을 사용하면 점호각 제어로 DC값을 바꿀 수 있다)
3상 전파정류회로를 이용하면 교류전압이 아래와 같이 변한다.

(2) 평활 회로
위에서 3상전파정류회로를 거친 후 전압은 평활회로를 거친다.
정류회로를 거친 전압은 리플이 많이 포함된 불완전한 DC이다.
평활회로를 거치면 좀 더 DC에 가까운 형태로 변환시킬 수 있다.
평활회로는 커패시터로 이루어져 있다.
커페시터는 전압의 급격한 변화를 억제하는 소자이기 때문에
이런 특성이 전압의 리플을 줄여 주고
DC에 가까운 형태로 변환시켜 준다.
(3) 인버터 회로
위의 정류회로와 평활 회로를 거치면 입력된 교류전압(AC)이 직류전압(DC)이 된다.
인버터회로에서는 직류로 변환된 전압을 다시 교류로 만들어 준다.
직류전압을 원하는 만큼 잘라서 +에 붙이고 -에 붙이면서
원하는 주기의 교류파형을 만들 수 있다.
이 과정은 스위칭 소자를 통해 가능해진다.
스위칭 소자는 GTO, IGBT가 있는데
근래에는 거의 IGBT소자를 쓴다.
인버터에서 직류를 교류로 바꾸는 과정은 다음과 같다.
정류회로와 평활회로를 거치면
인버터회로로 직류전압이 들어 오게 된다.
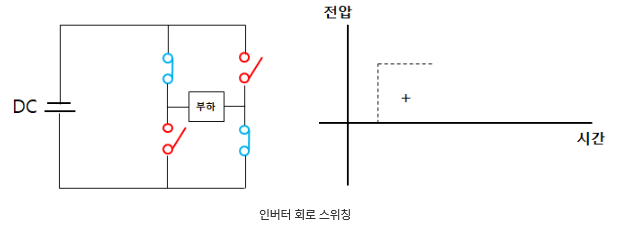
아래 회로에서 그 직류 전압을 DC전원으로 표현한다.
1. 파란색 스위치를 닫고 빨간색 스위치를 열면 부하에 +값의 전압이 걸린다.
2. 빨간색 스위치를 닫고 파란색 스위치를 열면 부하에 - 값의 전압이 걸린다.
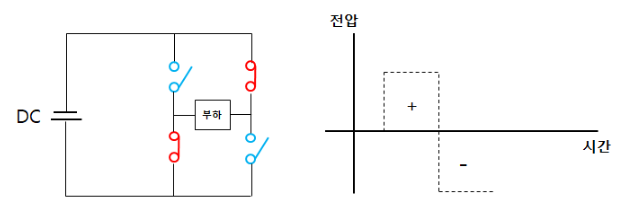
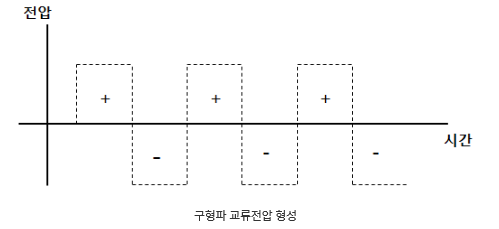
3. 이 과정을 반복해 주면 +,- 값이 왔다 갔다 하는 교류 구형파가 만들어 진다.
빨간색스위치와 파란색 스위치를 열고 닫는 시간에 따라 이 구형파의 주기가 결정된다.
인버터 구동회로를 이용하면 직류를 교류로 바꿀 수 있고
주기를 결정할 수 있기 때문에 주파수 역시 원하는 대로 만들 수 있다.
그리고 전압의 크기 역시 변환가능하다.
ON, OFF시간을 짧게 하냐 길게 하냐에 따라 교류전압의 rms값 크기 역시 변하게 된다.
시간을 길게 끌게 되면 rms 크기가 커지고 짧게 끌게 되면 rms 크기가 작아지게 된다.
거기에 따라서 전압값이 바뀐다.
인버터를 거쳐서 새로 만들어진 교류전압은 위에서 본 것처럼 구형파 형태이다.
구형파 전압이 들어가더라도 모터는 문제없이 회전가능하다.
또한 모터의 고정자 코일에 들어가는 전류는 코일의 영향으로 구형파 전압을
따라가지 않고 구형파 전압보다는 좀 더 정현파에 가까운 형태의 전류이다.
(인덕터(코일))은 전류의 급격한 변화를 억제하는 소자이다)
3. 인버터의 다른 명칭
인버터는 모터에서 사용할 때 이런 명칭들로 불리기도 한다.
인버터(Inverter)
= AC Drive
= VVVF (Variable Voltage Variable Frequency) - 가변 전압 가변 주파수
=VFD (Variable Frequency Drive)
=VSD (Variable Speed Drive)
4. 'Soft Starter'와 비교하여 인버터 기동의 특징
'Soft Starter'는 Y-△, 리엑터, 기동보상기 기동법에 비해 부드러운 기동과
정지가 가능했다. 이는 사이리스터 소자를 이용하여 점호각 제어로 전압을
조정할 수 있기 때문에 단계적인 제어가 가능했다.
인버터 기동 역시 Soft Starter와 같이 전압을 단계적으로 올리고 내릴 수 있어
부드러운 기동, 정지가 가능하다.
그에 더해 Soft Starter는 불가능한 운전 중 속도제어가 가능하다는 장점을 가지고
있다.
그렇기 때문에 속도제어가 필요한 경우 인버터 기동을 이용하면 된다.
그러나 인버터가 사이리스터 소자에 비해 가격이 비싸다.
그러므로 속도제어가 필요없는 경우에는 사이리스터 소자를 사용하는
Soft Starter가 더 경제적이다.
다만, 기동, 정지가 빈번한 경우에는 장기적으로 봤을 때
인버터 기동이 더 경제적일 수가 있다.
현장 상황을 따져보고 알맞은 기동법을 사용하면 된다.
5. 인버터 기동 속도제어에서 전압과 주파수와의 관계
인버터를 이용하면 주파수와 전압을 조정하여 속도제어 및 부드러운 기동,
정지를 할 수 있다.
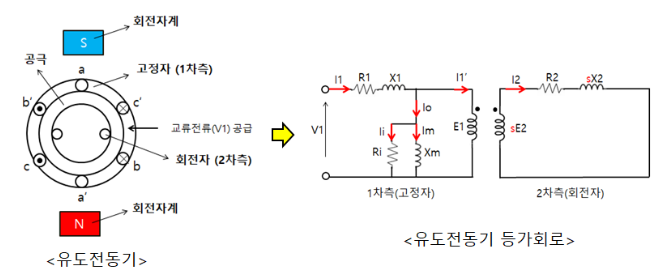
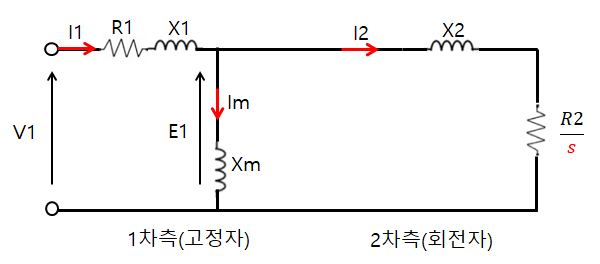
아래는 위의 유도전동기 등가회로를 근사화한 IEEE 등가회로이다
1차측 고정자를 통해 입력된 전압(V1)은 2차측 회전자로 전달된다.
2차측으로 유기된 기전력(E1)의 크기는
V1이 크면 V1과 E1은 거의 같고
V1이 작으면 R1, X1에서 발생하는 전압강하를 무시할 수 없게 돼서
E1과 같다고 할 수 없다.
V1이 큰 경우에 V≒E=4.44fNφ 로 표현 가능하고
V/f 와 E/f 는 거의 같게 된다.
V/f ≒ E/f ∝ φ
그리고 V/f 와 E/f는 전동기의 1차측과 2차측 사이에 비어있는 공간(공극)의
자속의 크기와 비례하게 된다.
V/f ≒ φ
V/f가 자속의 크기와 비례하는 부분이 인버터 기동에서 중요하다.
인버터 기동에서 속도를 줄이기 위해 정격전압에서 주파수(f)를 떨어 뜨리면
위에서 V/f는 자속에 비례함에 따라 주파수가 줄어드니까 자속이 증가한다.
주파수가 많이 떨어져서 자속이 많이 증가하면 철심이 포화하게 된다
그러면 고정자의 전류가 매우 증가하게 되어 철손 및 고정자 동손이 증가한다.
인버터 기동에서 효율을 위해 속도제어를 하는데
이런 손실들이 증가한다면 속도제어의 의미를 잃는다
그러므로 이런 부작용을 막기 위해서
주파수만을 제어하지 않고 전압도 같이 움직여서 자속의 크기를 일정하게
해줘야 한다
그래야 철심이 포화가 안되고 토크가 일정해진다.
자속을 일정하게 하기 위해 주파수를 제어하면서 전압을 같이 제어한다.
이것을 이름 따서 VVVF(Variable Voltage Variable Frequency)
가변전압 가변 주파수를 이용하면 속도제어로 많은 에너지 절감을 할 수 있다.
정리하면
1) 유도전동기에서 인버터 기동을 하면 기동, 정지시 단계적인 전압조정으로
안정적인 기동이 가능하다.
2) 속도제어도 가능하다.
3) 속도제어시에는 전압과 주파수의 비례제어가 필요하다.
주파수만 조정하여 속도제어하면 철손, 동손이 증가한다.
4) 인버터 기동의 운전영역은 두가지로 나눠진다.
① 일정토크 운전영역 : 기준주파수 이하의 영역에서 주파수와 전압이 비례제어되어
일정토크가 유지되고 주파수의 크기와 비례하여 출력값이 달라지는 영역
② 일정출력 운전영역 : 기준주파수를 넘어가는 영역에서 전압을 더이상 올릴 수 없는
영역으로 주파수는 증가하나 전압이 증가하지 못하여 토크가 줄어들게 되고
속도는 증가하게 되어 출력값이 일정한 영역
5) 전압이 낮은 기동초기에는 R1, X1에 의한 전압강하를 무시할 수 없으므로
토크가 작아지게 된다. 그러므로 초기에는 높은 전압값을 입력해 주어
토크를 상승시킬 필요가 있다.
6) 인버터 기동에서 기동전류는 일정하게 유지 가능하고 이 값은 원하는 대로
설정 가능하다. 낮은 전류에서 큰 토크가 가능하다.
'전기인이 되는 길 > 전기기기' 카테고리의 다른 글
| 3상 유도전동기의 원리 (0) | 2021.10.25 |
|---|---|
| 단권변압기 (0) | 2021.10.25 |
| 유도전동기 기동법 'Soft Starter' (0) | 2021.10.22 |
| 유도전동기 기동법(3) 기동보상기 기동법 (콘돌퍼 기동법) (0) | 2021.10.22 |
| 유도전동기의 Y - △ 기동법, 리액터 기동법 (0) | 2021.10.22 |