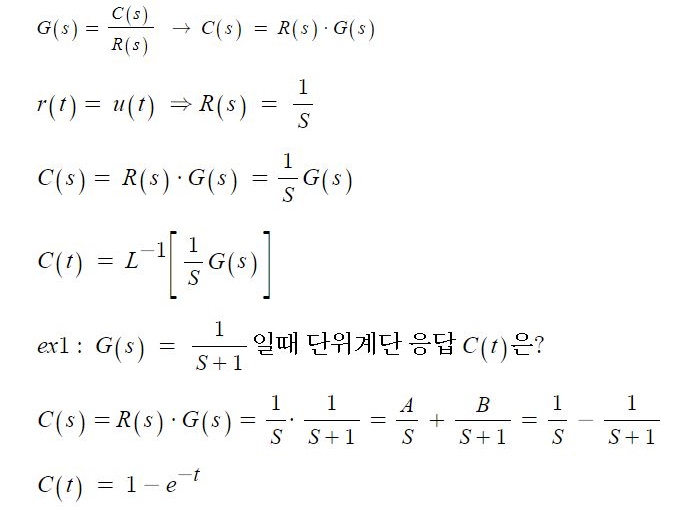
1. 제어계
자동제어 : 개회로 (개루프, open-loop) 입력 ⇒ 전달 ⇒ 출력
폐회로 (폐루프, Closed -loop, feedback) 입력 ⇒ 전달 ⇒ 피드백 ⇒
전달 ⇒ 출력
① 개루프 회로
◎ 시퀸스 제어 : 처음에 정해진 목표값 대로 동작 : 피드백 없음
◎ 특 징 : 시스템이 간단하다
설치비가 저렴하다
제어동작이 출력과 관계없이 오차가 많이 생김
⇒ 오차를 교정할 수 없다
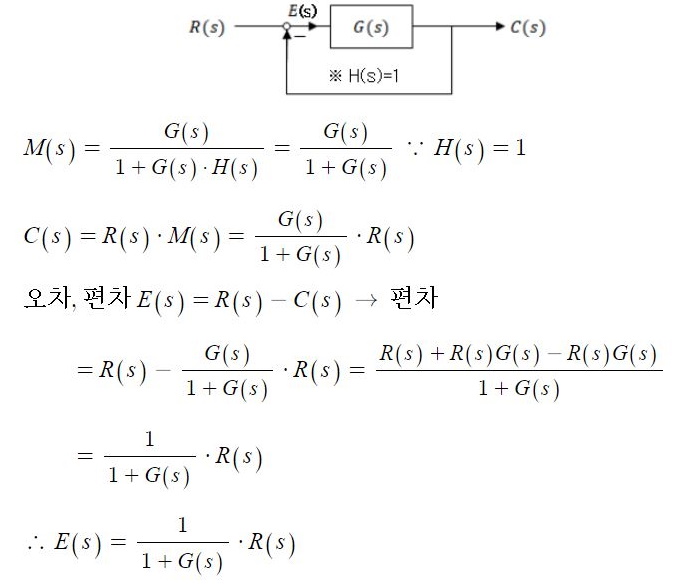
※ 오차 : 입력과 출력의 차이
② 폐루프 제어 : 피드백 - 검출부와 비교부가 있다
◎ 제어계 출력이 목표값과 일치하는지 비교하고
⇒ 일치하지 않는 경우 그 차이에 비례하는 정정 동작신호를
제어계에 다시 보내 오차를 수정한다
※ 검출, 비교부가 반드시 존재
◎ 장단점
| 장 점 |
단점 |
정확성이 높다
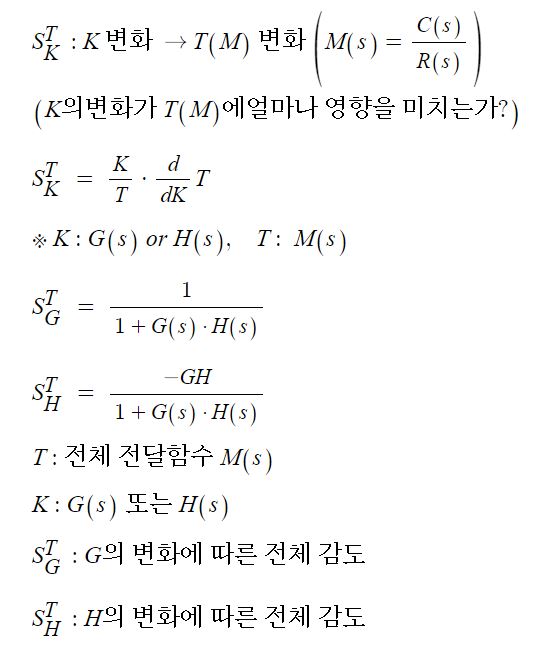
계의 특성 변화에 대한 입력 대 출력비의 감도 감소
감대폭의 증가
발진을 일으키고 불안정한 상태로 되어 가는 경향성 |
비쌈
일부에 문제가 있으면 전체가 영향 받을 수 있음
|
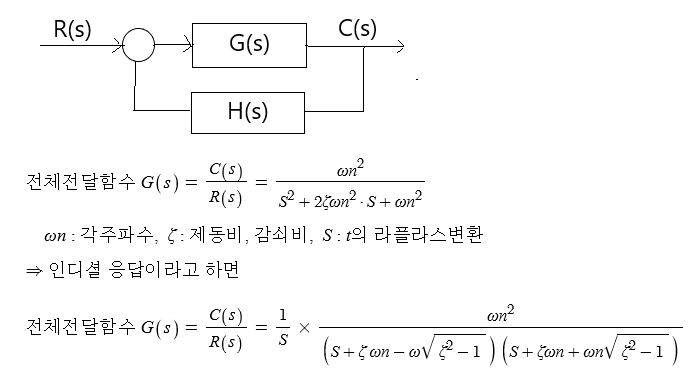
2. 폐루프 제어계의 구성
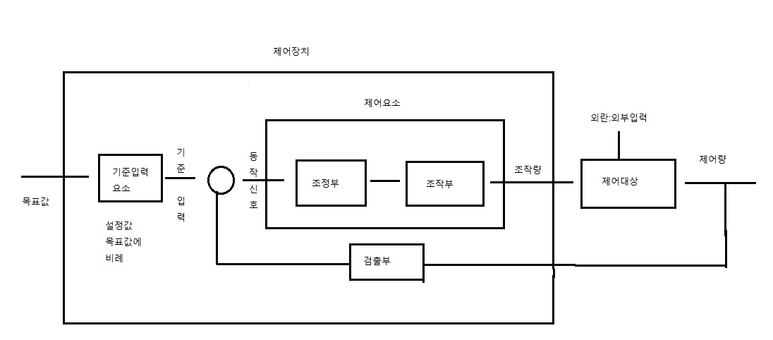 제어계의 구성
제어계의 구성
◎ 목표값 : 입력값으로 피드백 요소에 속하지 않는다
◎ 기준입력요소 : 목표값에 비례하는 기준입력 신호(전기신호)를 발생하는 장치
◎ 동작신호 : 폐루프에 직접 입력으로 가해지는 입력으로 두 피드백 신호와의 차이로서
제어를 일으키는 요소
◎ 제어요소 : 조절부와 조작부로 구성되어 있으며 동작신호를 조작량으로 바꾸어
변환하는 요소
◎ 조절부 : 제어요소가 동작하는데 필요한 신호를 만들어 조작부에 주는 것
◎ 조작부 : 조절부에서 받은 신호를 조작량으로 바꿔서 제어 대상에 주는 것
◎ 조작량 : 조작부의 출력으로 제어요소가 제어 대상에 가하는 제어신호로서
제어요소의 출력
◎ 검출부 : 제어량을 검출하고 입력부와 비교하는 장치 (비교부가 반드시 있음)
◎ 제어대상 : 제어활동을 받지 않는 출력발생 장치로서 제어계에서 직접 제어를 받음
◎ 제어량 : 제어를 받는 제어계 출력, 제어 대상에 속하는 량
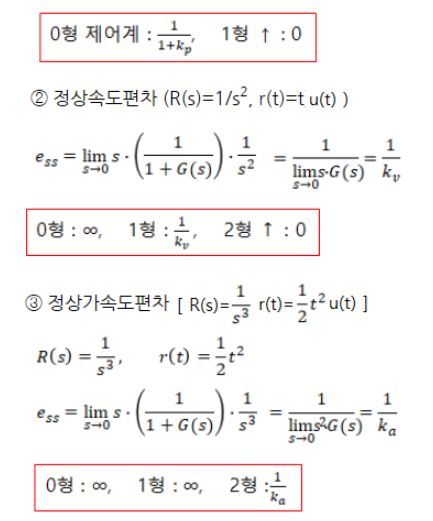
◎ 편차 : 목표값과 제어량의 차이
3. 자동 제어계의 분류
① 목표값 : 정치제어(목표값 일정) - 프로세스 제어 (밀도, 농도, 온도 등)
- 자동조정 (전기와 관련, 전압,전류, 전력 등)
추치 제어 - 추종제어 - 미사일..(위치, 방향, 자세 등...)
- 프로그램 제어 - 무인열차, 엘리베이터, 자판기...
미리 정해진 값에 의해 작동
- 비율제어 - 배터리..
※ 정치제어 : 목표값이 일정함, 추치제어 : 목표값이 변함
② 제어량 - 프로세스 (화학) - 농도, 압력... 유량, 밀도, 습도 등
- 서보기구 - 위치, 방향, 각도...추종 제어와 유사 : 로보트 팔 (위치, 방위 각도 등)
- 자동조정 기구(전기) - 전압, 전류...
③ 제어 동작
- 불연속 - on/off 동작
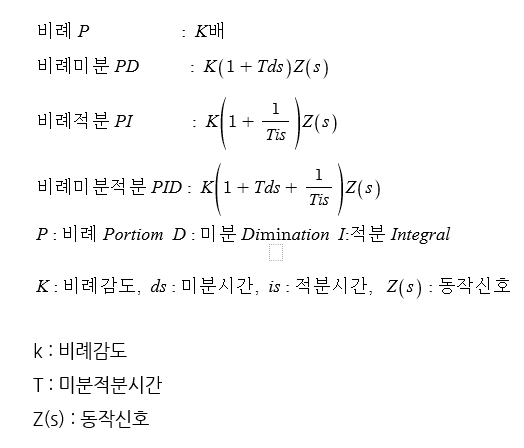
- 연속 - 비례 P : k - 잔류편차 (오차) 많이 발생 (offset), 간단하나 오차(offset) 발생
- 비례미분 PD : k(1+Tds) Z(s) - 속도 빠름, 잔류편차, 오차 존재
- 비례적분 PI : k(1+1/Tds)Z(s) - 잔류 편차 없음, 속도 느림, 오차를 없앰
- 비례미분적분 PID : k(1+Tds + 1/Tds) Z(s) - 속도 빠름, 잔류편차 제거
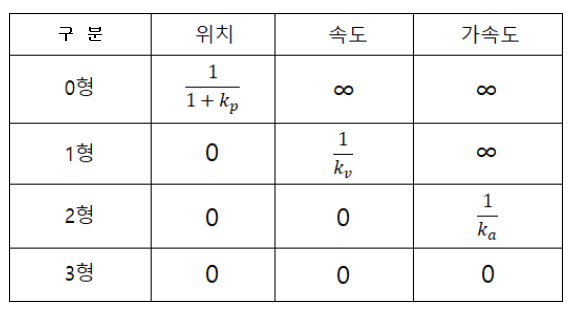
▶ 자동제어계의 분류
1. 제어량의 성질 에 의한 분류
① 프로세스제어 : 온도, 유량, 압력, 액위, 농도, 밀도를 제어량으로 가짐.
② 서보기구 : 물체의 위치, 방위, 자세 등을 제어량으로 가짐.
③ 자동조정 : 전압, 전류, 주파수, 회전속도, 힘 등 전기적, 기계적 양의 제어량
2. 제어의 목적 에 의한 분류
① 정치제어 : 제어량을 일정한 값으로 유지함을 목적으로 함.
② 프로그램제어 : 미리정해진 프로그램에 따라 제어량을 변화시킴을 목적으로 함.
③ 추종제어 : 시간변화를 하는 목표값에 제어량을 추종시킴을 목적으로 함.
④ 비율제어 : 목표값을 어떤것과 일정비율관계를 이용하여 변화시킴을 목적으로 함.
3. 조절부의 동작 에 의한 분류
① 비례제어 (P 동작)
⇒ 잔류편차(offset)생김
② 비례미분제어 (PD 동작)
⇒ 속응도(응답속도)향상, 과도특성개선, 진상보상회로에 해당.
③ 비례적분제어 (PI 동작)
⇒ 잔류편차제거, 정상특성개선
④ 비례적분미분제어 (PID 동작)
⇒ (2),(3)의 장점만 있음. 속응도향상, 잔류편차제거, 정상/과도특성개선
⑤ 온오프제어(=2위치제어)
⇒ 불연속제어(=간헐제어)
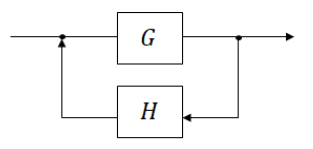
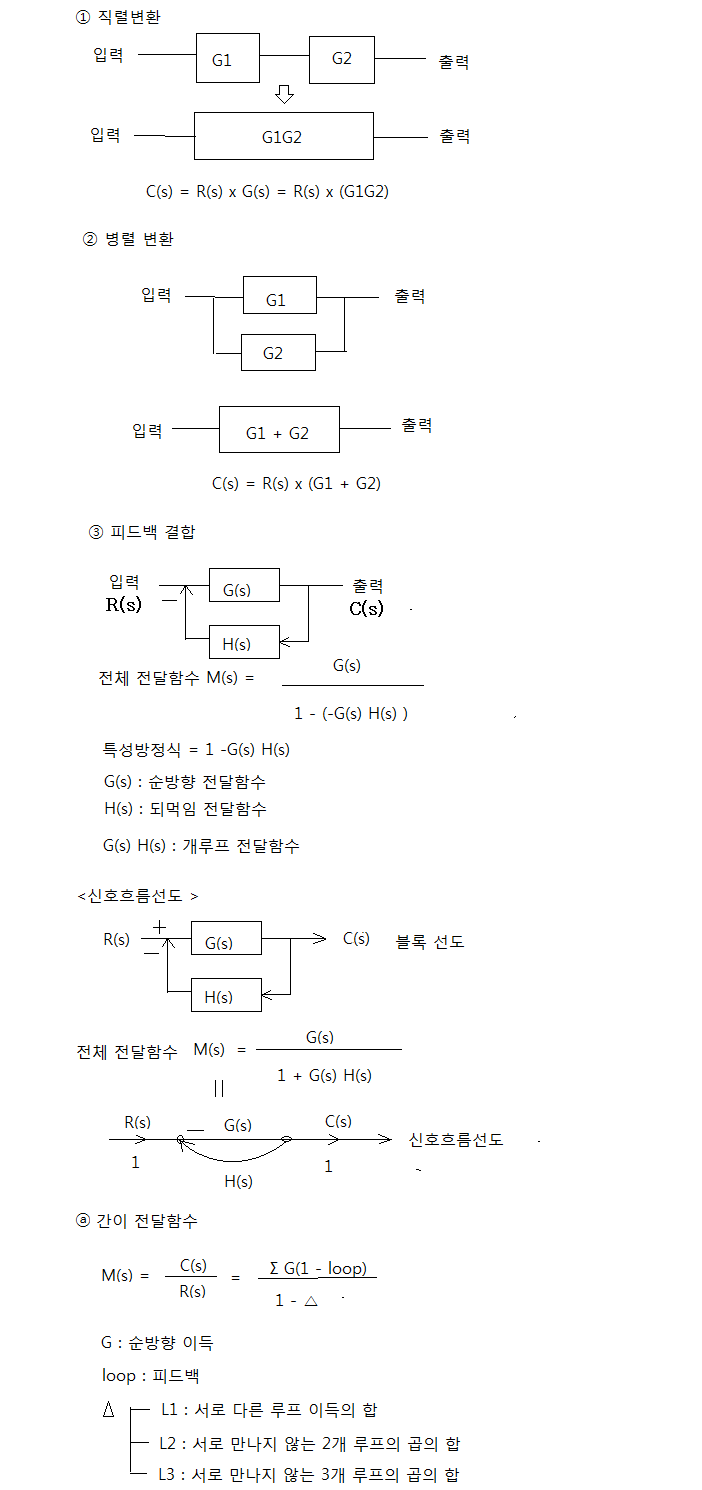
【 블록선도의 등가변환, 신호흐름선도 】
[블록선도]
 블록선도, 신호흐름선도
블록선도, 신호흐름선도
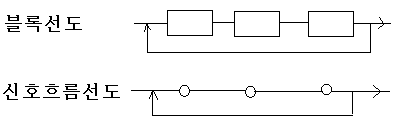
블록선도 : 자동계중에 포함되어 있는 각요소의 신호가 어떠한 모양으로 전달되는가를
나타내는 선도
블록 : 입출력간의 전달특성을 표시하는 신호흐름도의 요소로서 사각형 블록으로 나타낸 것
가합점, 분기점 등..
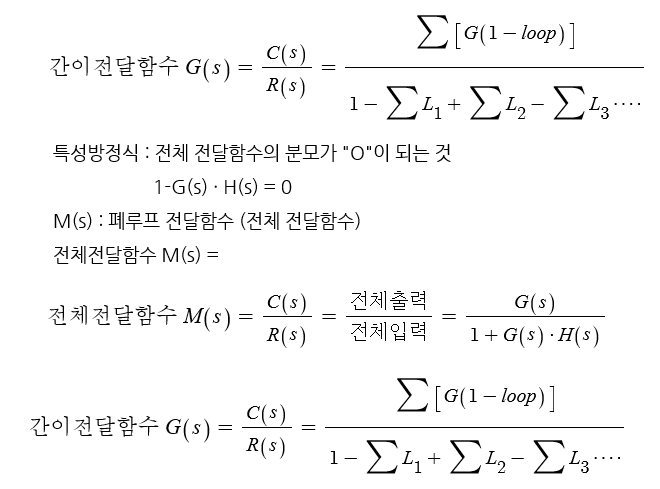
△ = L1 - L2 + L3
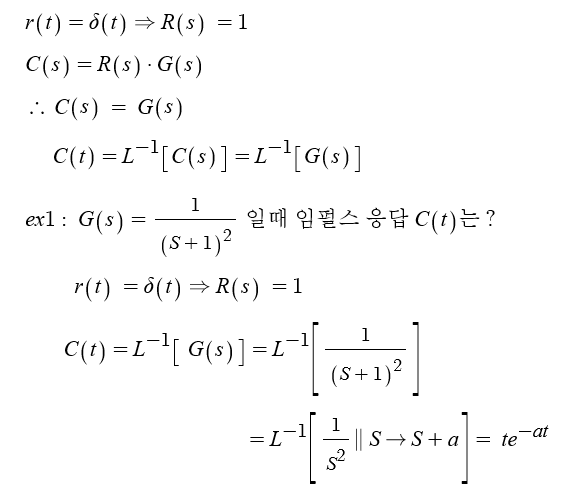
※ C(s)의 C는 영어의 Contest (답변 제기)로 연상하면 됨
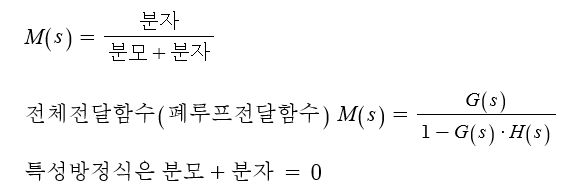
※ 간이전달함수
신호흐름선도 : 선형시스템에 적용하고 신호흐름선도에 사용하는 방정식은 원인의 함수로
표현되고 신호흐름은 가지의 화살표 방향으로 이동한다.
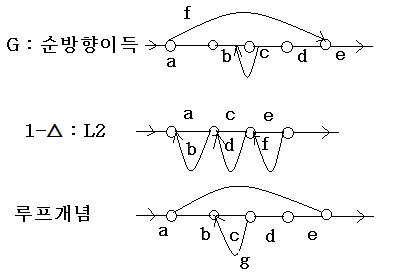
G : 순방향 이득
각 방향의 순방향 경로 이득의 합
G = abcde + afe
1 - △ : L1 : 존재하는 모든 루프 이득의 합
- ( ab + bc + de )
L2 : 독립하여 존재하는 모든 2개 루프 이득의 합
+ abcd + cdef + efab
L3 : 독립하여 존재하는 모든 3개 루프 이득의 합
- abcdef
루프의 개념 : Σ G (1 ± loop) = + abcde (1- 0) + afe ( 1 + cg )
= abcde + afe (1 + cg)
※ 루프(loop) : 한마디에서 시작하여 다시 그 마디로 돌아 오는 것
독립하여 존재하는 루프(되먹임, 피드백)를 말함
 예제
예제
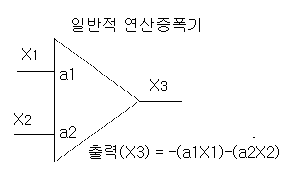
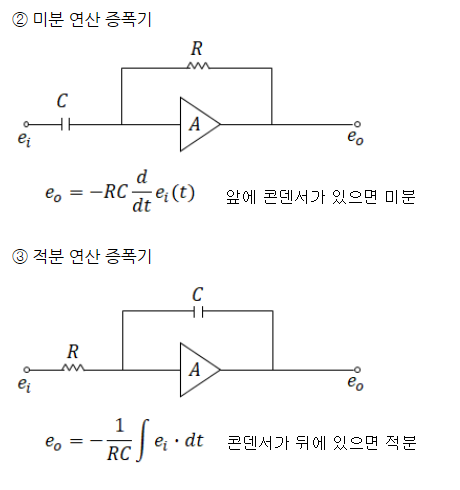
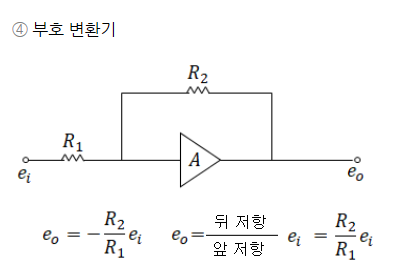
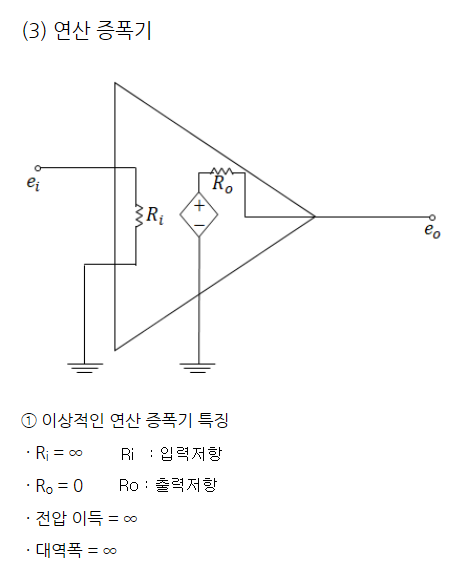 증폭기
증폭기
o 개루프 전달함수 ⇒ 폐루프 전달함수
[제3강 문제풀이]
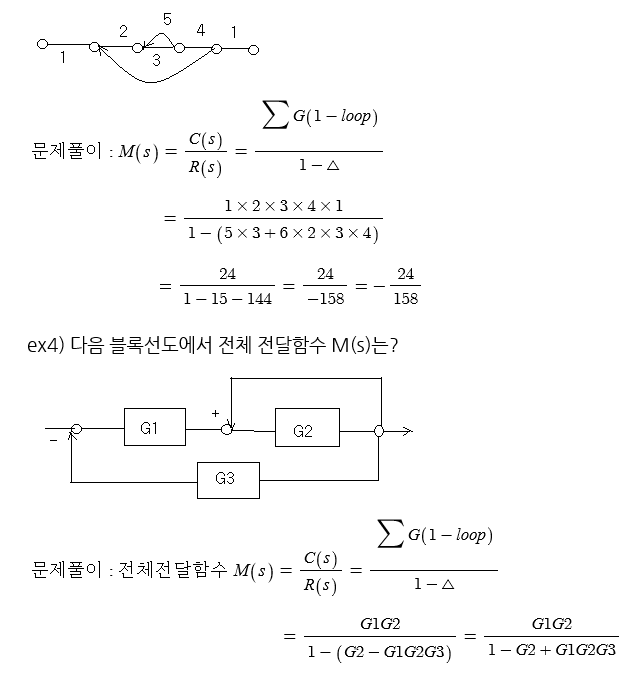
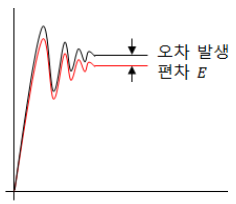
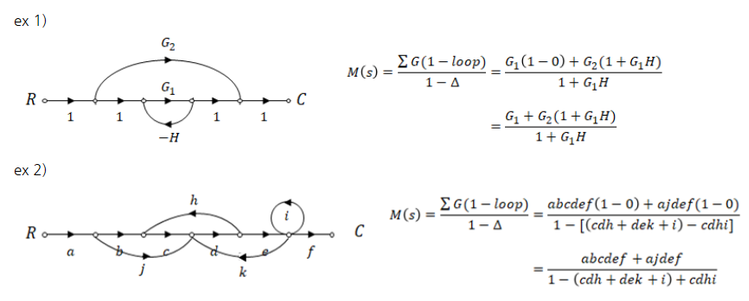
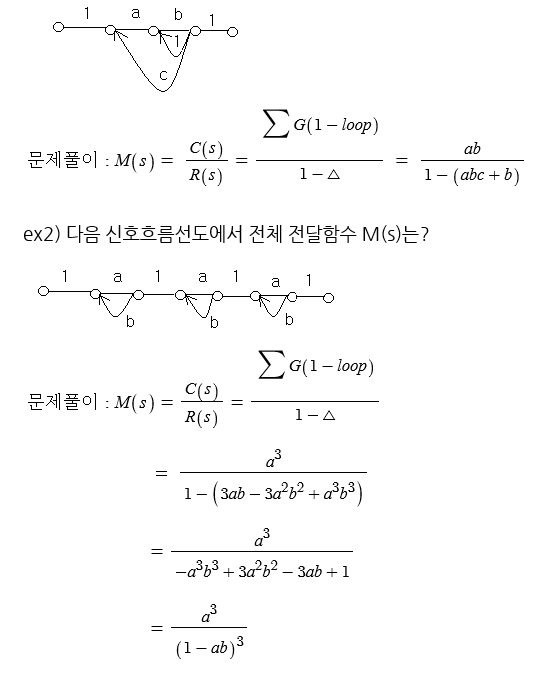
ex1) 다음 신호흐름선도에서 전체 전달함수 M(s)는?
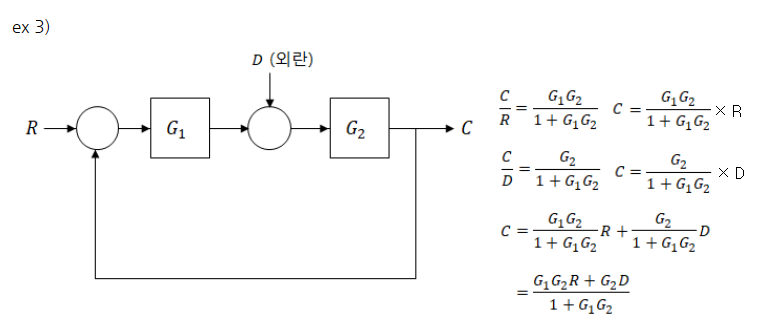
ex3) 다음의 신호흐름선도에서 전체전달함수 M(s)는?