PID 제어 (비례, 적분, 미분 제어)란?
자동제어는 감지기 및 센서로 부터의 신호를 읽고 목표치와 비교하면서
설비기기의 운전 및 정지 등 "조작량"을 제어하고 목표값에 가깝게 하는 명령입니다.
여기서 "조작량"을 목표값과 현재 위치의 차이에 비례한 크기로 생각하고
조금씩 조절하는 방법이 "비례 제어"라고 합니다.
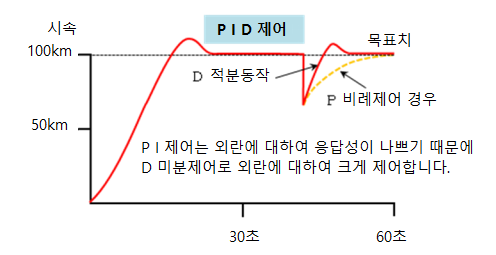
비례제어의 일반적인 제어방식으로는 "PID"가 있습니다.
P 동작 : Proportional 동작 (비례 동작)
I 동작 : Integral 동작 (적분 동작)
D 동작 : Differential 동작 (미분 동작)
1. 비례제어 방식
ON-OFF 제어 보다 제어 결과의 정확도를 높일 수 있는 자동제어 방식으로
비례제어 방식이 있습니다.
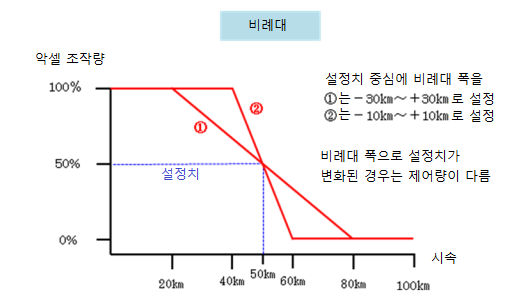
범위의 MV(조작량)가 제어 대상 PV(측정값)의 변화에 따라 0~100[%] 사이를
연속적으로 변화시키는 것을 생각한 제어방식입니다.
일반적으로 SV(설정값)은 비례대역의 중심에 놓습니다.
ON-OFF 제어에 비해 헌팅이 작고 부드러운 제어 가능합니다.
"자동차 운전"을 예로 들면, 목표값과 현재값의 차이가 크면 악셀을 더 밟아 속도를
더해가고 목표치에 가까워지면 악셀을 서서히 줄이는 것처럼 속도를 제어합니다.
이렇게 하면 비례제어로 잘 제어할 수 있다고 생각할 수 있지만
비례제어는 목표치에 도달하면 문제가 발생합니다.
목표치에 근접하게 되면 목표치와 편차가 적어, 조작량이 너무 작게 되고
더 이상 세밀하게 제어할 수 없는 상태가 되어 버려, 조작이 멈춰 버리게 되고
안정화 되어 버리는 현상이 일어나게 됩니다.
사람이 조작하는 경우에는 목표치에 딱 맞추는 것이 가능하지만
조절기 등을 사용하여 전기적으로 제어하는 경우에는
목표값과의 차이(편차)가 너무 작아 측정 오차 범위에 들어가 버리면
통제, 제어가 불가능한 상태가 되어 버립니다.